TOPMO3
-
Постов
1949 -
Зарегистрирован
-
Посещение
-
Победитель дней
76
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент TOPMO3
-
Владельцы ОСВ ругают АФ, владельцы АФ считают, что симкоммандер киллер фича, владельцы CSW считают, что такой момент нафиг не нужен, владельцы боднара смотрят на всех как на говно. Все как обычно, все в порядке
-
Денис, конечно не уверен, я сам только пытаюсь во всем этом разобраться. :laugh: Корпус-то фиг с ним, я за свою проводку боюсь при таких токах. Но там, конечно, не на постоянку 15А, а 12А только в пиках, когда выдается макс мощность
-
это так, только ведь в нашем случае ни тот, ни другой не выходят на оптимальные обороты. Т.е. нам не нужен какой-то момент при определенной скрости вращения, нам нужна как можно более быстрая смена направления вращения, либо макс быстрый старт вращения. А здесь как раз шаговые проигрывают http://www.amci.com/...er-vs-servo.asp https://www.festo.co...os_steppers.pdf http://components.ab...ing-A-Motor.htm Мне кажется это происходит из-за работы того, что называют micro stepping https://www.festo.co...os_steppers.pdf Т.е. наверно можно сразу выбрать шаговик помощнее, чтобы нивелировать эту просадку в 30%, но тогда смысл? И по размерам, и по цене видимо уже приблизимся к серво. Кроме того, мы ведь не можем гонять шаговик в его нативном open loop режиме, все равно нужен энкодер (как в тех же логитечах делают), а это для нас лишние конструктивные сложности. Ну и сейчас OSW настраивают в режиме Torque control (по заветам Лео Боднара), в случае с шаговиком это делать проблематичнее
-
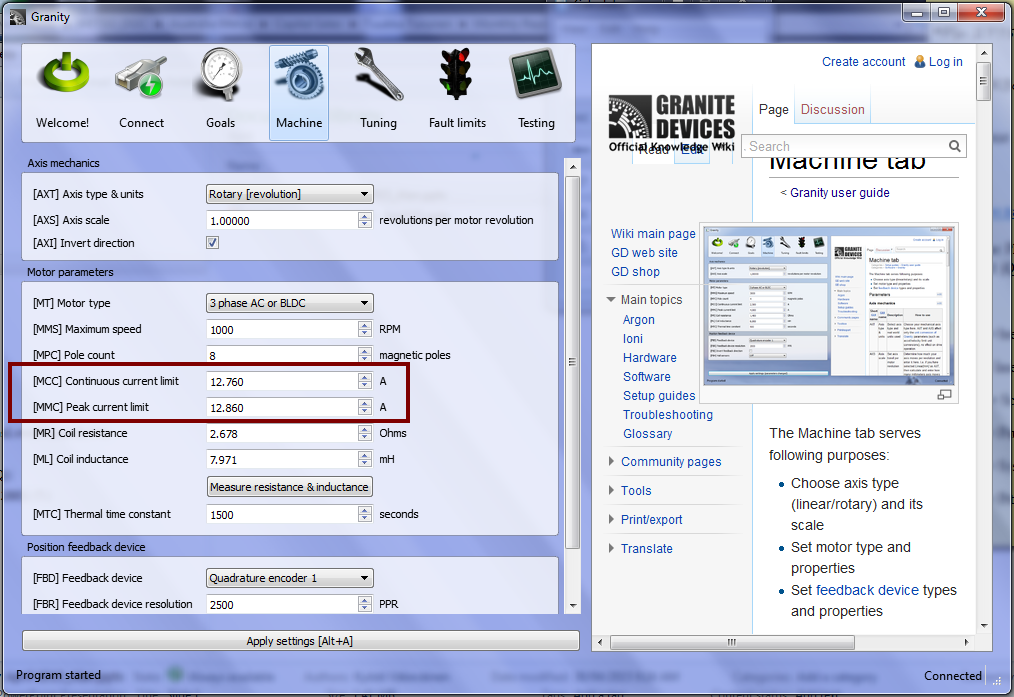
Немного подзагуглил эту тему и картина вырисовывается следующая. интересный момент в том, что в русскоязычных источниках обычно ведут речь о влиянии напряжения на крутящий момент, например: Согласно этому, вроде как в нашем случае крутящий момент движка должен быть в 220/50=4 раз меньше заявленного. в то же время, в англоязычной прессе можно найти упоминание о зависимости от тока: А здесь получается совсем другой коленкор, т.к. ioni способны выдавать такой ток: Drive current limit increased on DC motor mode on all IONI models: 19.5 A on IONI 23.4 A on IONI Pro 30.0 A on IONI Pro HC Далее в спеках на движки МиГе можно найти параметр Torque coefficient(N.m/A), который для 130STM10010 равен 2.2. Если мы посчитаем для рекомендованного параметра тока Rated current(A)=4.5A, то все сходится - 10Nm/4.5A = 2.2 Но, поскольку иони способны выдавать больший ток, то посчитав RMS от пикового значения: IONI 19.5A peak / 1.414 = 13.8A rms IONI Pro 23.5A peak / 1.414 = 16.6A rms IONI Pro HC 30A Peak /1.414 = 21.2A rms соответсвенно, с движка 130STM10010 мы можем получить: IONI: 2.2 * 13.8 = 30.4 Nm IONI Pro: 2.2 * 16.6 = 36.52 Nm IONI Pro HC: 2.2 * 21.2 = 46.64 Nm Т.е. даже самая младшая модель может полностью загрузить не только 130STM10010, но и 130STM15015 (здесь правда нужно пересчитать, т.к. Torque coefficient для него 1.58) Здесь уже встает вопрос как бы не спалить движок, но конфигуратор иони имеет соответсвующие настройки на это - ограничение выходного тока да, забыл добавить, выше = это все теория, а практика, т.е. тесты как Такера, так и например, здесь говорят, что движок с этим драйвером честно отдает ~20Nm

-
Вот что пишет Joe Sullivan, тоже сборщик китов We run at lower voltages to keep the speed of the motor low. Supposedly the slower the motor RPM the better for a direct drive wheel. Т.е моё предположение, что движок питается от 50в вместо 220в - подтверждает
-
хорошую тему поднял, надо прояснить этот момент. Задал у них там в теме вопрос, может кто прояснит
-
в OSW движок не включается напрямую в 220В. Посмотри схему подключения, например с 1x IONI, 220В идет только в БП, затем в ioni и только потом в движок (если честно, то мне это самому пока непонятно, как однофазный 220В движок питают от судя по всему 50В постоянки). Поэтому мне кажется, что тут механизм работы с ИБП будут отличаться от того, что ты испытывал при прямом подключении двигателя в 220В. И эти мощные кондеры в БП несколько гасят скачки напряжения/тока на ИБП [quote name=CAMOJIET' timestamp='1459158173' post='178934] Дмитрий (ТОРМОЗ) Вот ты как человек с руками и головой О_О Это все не про меня В любом случае, надо для начала хотя бы для себя собрать для опыта. Не советую никому отдавать свои кровные кому-то без набитой руки (в любом деле), зачем быть подопытным кроликом?
-
Я в этих всех тредах постройки OSW не встречал каких-то жалоб на ИБП. Да и АФ и Боднар вроде без ибп нормально работают. Для серводрайвера вот ставят качественные БП, могущие дать кратковременный мощный ток, аля http://www.antekinc.com/ps-8n50-800w-50v-power-supply/
-
Точно, прошу прощения :) Я, думаю, тоже долго не смогу держаться. Надо как-то скооперироваться, чтобы заказывать небольшими партиями - м.б. доставка получиться дешевле
-
парни, это вам в фан-клуб вангователей переломанных ручонок Даниила @JohnDoe
-
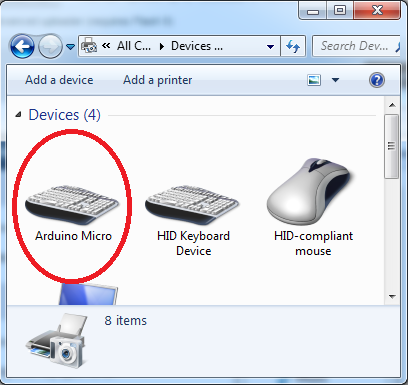
 так я же дал ссылку, где покупал - http://www.chipdip.ru/product/g1183b/ Это наиболее подходящая, какую нашел. В идеале, наверно, мне бы хотелось побольше. Если кто еще какой вариант найдет - киньте ссылку, пожалуйста В винде определяется как клавиатура. иР у меня вообще не делает различий между родной клавой и им. Просто определяет, что нажата комбинация клавиш.
так я же дал ссылку, где покупал - http://www.chipdip.ru/product/g1183b/ Это наиболее подходящая, какую нашел. В идеале, наверно, мне бы хотелось побольше. Если кто еще какой вариант найдет - киньте ссылку, пожалуйста В винде определяется как клавиатура. иР у меня вообще не делает различий между родной клавой и им. Просто определяет, что нажата комбинация клавиш.
-
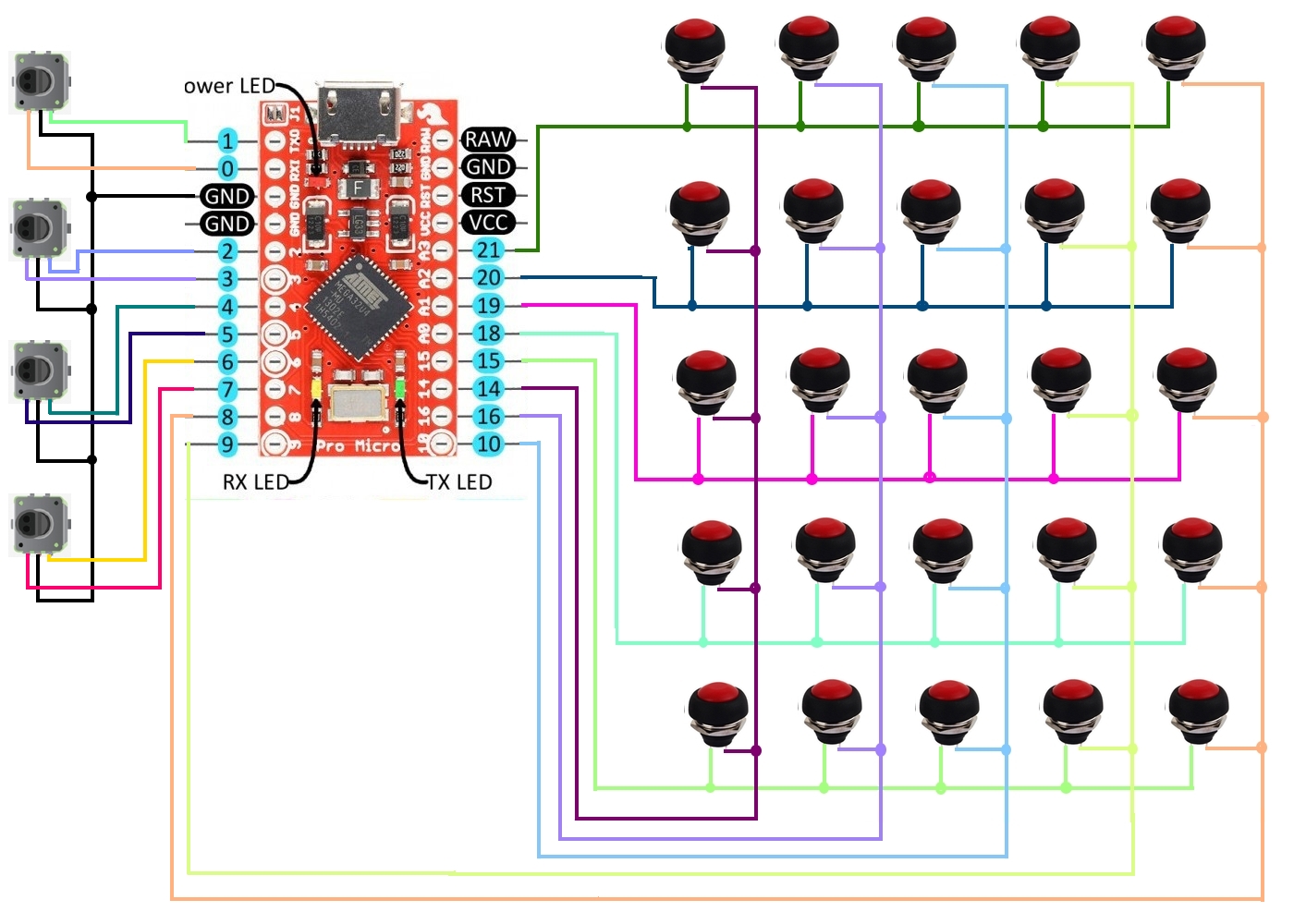
Вариант 2 - обычный универсальный баттонбокс Ингредиенты: - переключатели - 4 шт. - кнопки - 4 шт. - энкодеры - 3 шт - корпус использовал такой же, как и в первом варианте ББ с ардуинами мне не везет что-то. Первый я заказал такой, приехал с левым бутлоадером, заказал такой же у другого продавца - заказ отменили как подозрительный :facepalm: . Сейчас третий раз заказал - жду В общем, нужен клон Pro Micro. Хорошо искать по ключевым словам Pro Micro Аrduino ATmega32U4 5V/16MHz Судя по гуглу, проблема с бутлоадерами не редка, а заключается она в том, что ардуино после подачи питания работает в 2х-4х раза медленнее, чем должен. Если сделать резет - начинает работать нормально. Решение заключается в заливке штатного бутлоадера (нужен еще один ардуино УНО и программатор) или самое простое решение - вывести куда-то сбоку отдельную кнопку на резет (пины RST и GND) и нажимать ее каждый раз после включения ПК. Хотя может это мне просто не везло. Но если нужна будет помощь в перезаливке бутлоадера - пишите, помогу. Схема: Как видно из схемы, скетч поддерживает до 25 кнопок и до 4х энкодеров. Можно ставить меньше, изменений в скетч вносить при этом не требуется. Например у меня - 4х2 на переключателях + 4 кнопки + 3 кнопки на энкодерах - итого 15 кнопок. Я их собрал в неполную матрицу 4х4, соответственно она подключена к ногам 21, 20,19,18, 14, 16, 10, 9. Неиспользуемые пины 15 и 8 просто оставляю в воздухе. Думаю, принцип понятен. С энкодерами - аналогично. На схеме я ради простоты не подключил кнопки энкодеров, их нужно подключать в общую матрицу, как и любые другие кнопки. То, что происходит по нажатию кнопки, задается в двух частях кода: - символы всех кнопок char buttons[NUMROWS][NUMCOLS] = { {'q','w','e','r','t'}, {'y','u','i','o','p'}, {'a','s','d','f','g'}, {'h','j','k','l','z'}, {'x','c','v','b','n'}, }; - и то, как они "нажимаются" Keyboard.press(KEY_LEFT_CTRL); Keyboard.press(KEY_LEFT_ALT); Keyboard.press(key); delay(150); Keyboard.releaseAll(); Т.е. всем 25 возможным кнопкам определен какой-то символ - q,w,e,r и т.п. Их нажатие я сделал совместно с LEFT_CTRL + LEFT_ALT с теми соображениями, что такие трехкнопочные комбинации будут достаточно уникальны и не повлияют на те кнопки, которые уже возможно назначены и используются. То, что "нажимают" энкодеры, задается в структуре: rotariesdef rotaries[NUMROTARIES] { {0,1,KEY_RIGHT_ARROW,KEY_LEFT_ARROW,0}, {2,3,KEY_DOWN_ARROW,KEY_UP_ARROW,0}, {4,5,KEY_PAGE_UP,KEY_PAGE_DOWN,0}, {6,7,KEY_HOME,KEY_END,0}, }; Т.е. первый энкодер при кручении против часовой стрелки будет "нажимать" курсор вправо, по часовой - курсор влево, второй энкодер - против часовой курсор вниз, по часовой курсор вверх и т.д. Коды описаны здесь В целом вроде все. Скетч: buttsimp.zip
-
похоже, маркировка почти совпадает, но не 1-в-1. Думаю, они у того же продавца на али покупают, по цене тоже самое потому что
-
Если речь про OSW, то 3к - это как-то через чур. Там 1 - 1,5К я вот здесь немного описывал, откуда берется
-
+ быстрота вращения (отстуствие лага) + мощь, чтобы детали ффб руками не гасились. + линейная характеристика, чтобы детали ФФБ были реальной интенсивности угу
-
серводрайвер (все используют девайсы от granity) и плата, которая преобразует directinput (ФФБ) в команды этому серводрайверу (используют stm32fdiscavery) Остальное уже "обвязка" - крепления, блоки питания, баранка и т.д. А какой у тебя движок? Мне эта тема тоже очень интересна
-
у меня периодически свербит на эту тему. Тем более, что и придумать-то ничего не нужно, все уже готово - http://www.xsimulator.net/community/threads/diy-ffb-steering-wheel-mmosffb-in-progress.7769/ пока в мыслях взять движок дворников от газели, мотомонстер и прошивку MMos и посмотреть что будет Дима, а это точная инфа, т.е. ты пробовал? База ведь еще определяет, какая конкретно баранка к ней подключена, т.е. там не просто физический контакт, а некая логика работы с баранкой. Ну и всегда заявлялось, что со сторонними баранками (без уни хаба) ФФБ не работает
-
еще вариант - купить формульную баранку, вытащить оттуда начинку и вставить в твою баранку
-
Василий, формульная баранка за $180 против хаба + Г27 за $250?? Неоднозначный выбор :) Хаб, конечно, поуниверсальнее будет, но с другой стороны, это же лишний вес
-
Классный руль, только имейте ввиду, у CSW со сторонними баранками не работает ФФБ, у них там в своих баранках спец электроника для этого. Василий, то же самое и по поводу баранки от Г27 Чтобы был ФФБ со сторонними баранками нужен Universal HUB
-
в микре 5 интеррапт пинов, но от этого не легче. В общем, я отложил прерывания на крайний случай, сейчас с тремя энкодерами вроде как нормально работает. Пропускает только если уж совсем резко крутить. А ты каким образом реализовывал обработку энкодеров именно с софтверной части? Денис, я так понимаю ты именно про написание самого скетча? Если так, то тут с нуля просто так описать сложно. Я для второго баттонбокса постараюсь сделать наиболее универсальный скетч, чтобы его можно было легко модифицировать под конкретную задачу
-
Василий, никогда не бери ардуино за 2000 руб. :) Он стоит 300 руб макс при нынешних ценах. Если грубо, то цены примерно такие: - ардуино - 300 руб - коробка - 500 руб - кнопки, 6 шт - 200 руб - энкодеры, 5 шт - 300 руб, - переключатели, 4 шт - 500 руб т.е. грубо, небольшой баттнобокс имеет себестоимость около 2000 руб
-
Я напишу обязательно, но чуть попозже. Дело в том, что не все из запчастей мне сильно нравятся, и сейчас жду детали для еще одного баттонбокса (другой вариант, обычный, просто кнопки + энкодеры), посмотрю что приедет и дам ссылки на лучшее. Надеюсь, на следующей неделе все доедет
-
Теоретически их можно использовать, но это лишняя сложность. Владимир правильно говорит, УНО может только в com-порт что-нибудь послать, а на компе в этом случае нужна еще программа, которая будет из этого порта считывать и уже преобразовывать к нажатия кнопок. В общем, лишний гемор, а микро/леонардо могут из коробк работать как клава или мышка, т.е. input HID device
-
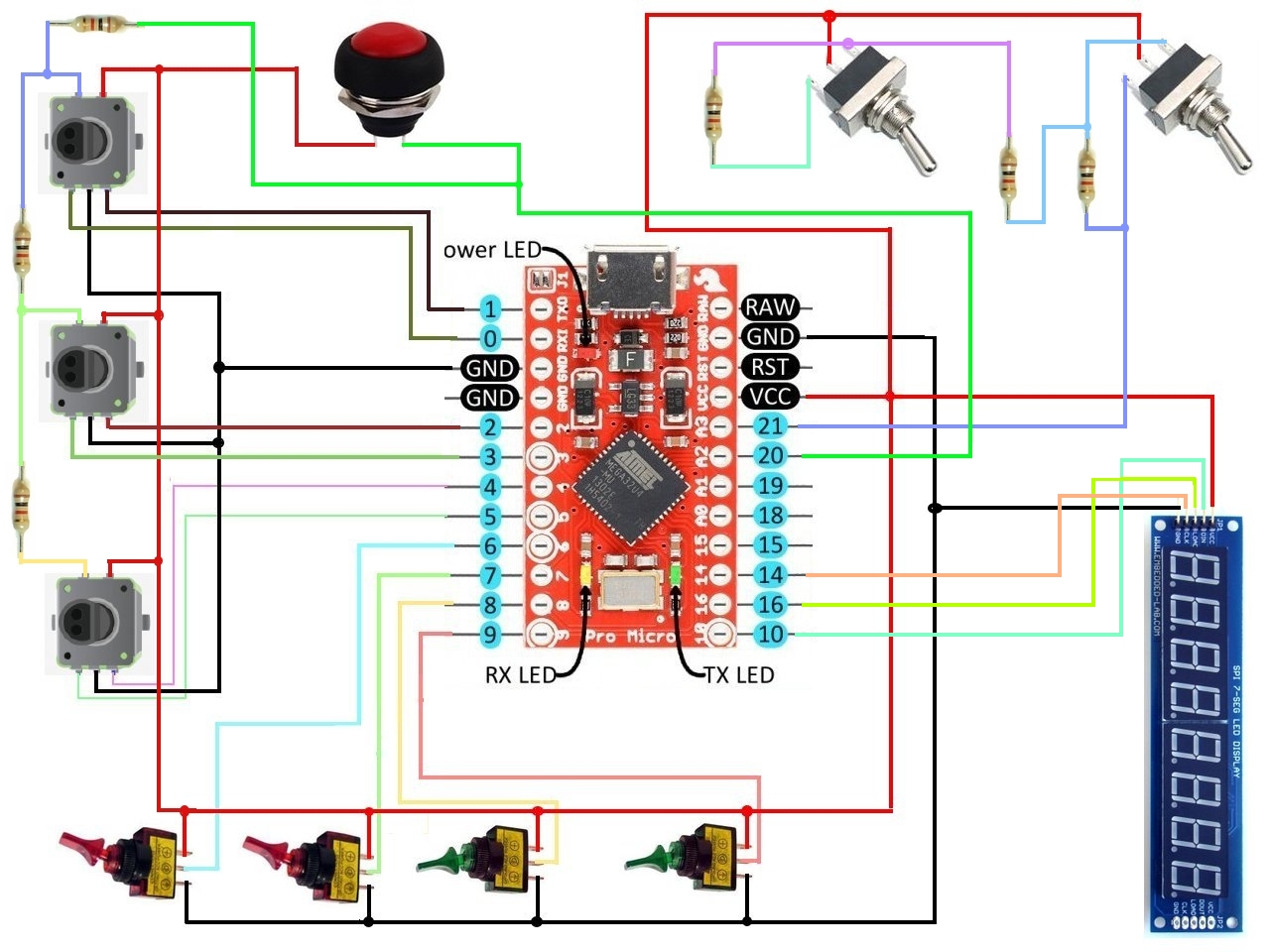
первоначально была идея сделать ББ специально для питов, потому что для меня всегда было трудно ехать и одновременно набирать на клаве что и где там поменять в питах. Получилась такая штука: Краткое описание: - красные переключалки: верхняя - менять шины спереди, нижняя - сзади - зеленые переключался: левая - делать fast repair, правая - чистить лобовое - маленькие металлические переключалки: верхняя - подкачать/скачать давление в передних колесах, нижняя - в задних - снизу два энкодера: левый - prev/next control, т.е. курсор вверх/вниз, правый - изменить значение, т.е. курсор влево/вправо. Кнопка на левом энкодера - выбрать/пробел, на правом - TAB - энкодер в правом верхнем углу - выбор кол-ва топлива на дозаливку, кнопка на этом энкодере - ESC - кнопка слева вверху - послать pit combo Чтобы не нажимать вслепую и было сразу видно, какое же пит комбо будет отработано - прикрутил дисплейчик. Правда, пришлось сделать некие кодовые обозначения, чтобы все поместилось Например, на скрине выше строка слева направо означает: снижаем давление и в передних, и в задних шинах на 7 пунков, чистим лобовое, делаем fast repair и доливаем 10 литров. Получившийся комбо пит можно увидеть в ировском окошке Требуются: - 1 Ардуино Микро/Леонардо (УНО/Нано не подойдут!) - 4 переключателя OFF-ON - 2 переключателя ON-OFF-ON, возвращающиеся в центральную позицию - 3 энкодера с кнопкой - 1 кнопка - 1 восьмиразрядный индикатор (я брал такой) - коробка, куда это все прикрутить (я брал такую) - 6 резисторов на 1кОм Схема: Скетч: buttpit.zip
- 116 ответов
-
- 19
-