TOPMO3
-
Постов
1949 -
Зарегистрирован
-
Посещение
-
Победитель дней
76
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент TOPMO3
-
 Я не очень понимаю, ты про БП от MeanWell или про что? У GD они дорогие, нет смысла брать у них. Дай плиз ссылку на то, что ты заказал. пс. я вас ненавижу, растравили душу, заказал тоже маленький миге...
Я не очень понимаю, ты про БП от MeanWell или про что? У GD они дорогие, нет смысла брать у них. Дай плиз ссылку на то, что ты заказал. пс. я вас ненавижу, растравили душу, заказал тоже маленький миге... -
вот так выглядит голый 6 ведроид. Почему не сделают автомасштабирование или перенос на след строку мне тоже не понятно
-
физика в основном считается на 360Hz, но интерфейсы ввода/вывода - на 60Гц. Т.е. опрос руля - на 60Гц, вывод на графику - тоже на 60Гц. А ответ на твой вопрос - интерполяция: http://members.iraci...85.page#8234567 С учетом цитаты Такера выше мне кажется, что надо сравнивать с 4 строкой - 59мс при 60Гц. При залочивании фреймрейта в иР на 60Гц ведь получается, что "inner" framerate of the game engine" становится 60Гц? Итого разница между 1 и 4 строкой - 33мс @JohnDoe, статейка интересная, спасибо
-
да, я в курсе, но поскольку никакой мелкосерийки я не планирую, у меня это где-то очень в дальних планах. Вот здесь гораздо интереснее, читать со слова Вторичный бутлоадер Суть - делается вторичный бутлоадер, который представляется как mass storage device, и прошивка заливается как просто копирование файла в эту "флешку". Именно то, что по ссылке, у меня с наскоку не заработало, но имхо направление идеологически верное, так и буду делать, когда дойдут руки
-
интересно, поковыряюсь вечером. Дебаг в трустудио тоже не совсем айс, ну хоть глобальные переменные показывает
-
насколько я понимаю эту кухню (я так-то ламо ))) ) - не должен, это же отдельный DMA контроллервот из референсов оптимизатор компилятора не дурит? Если нет, тогда дебаг в руки, благо он тут гораздо лучше, чем на ардуинах
-
у меня же DMA, от основного цикла развязано. Теоретически на что может повлять более высокая частота АЦП - на объем перекачиваемых данных между памятью и АЦП, поэтому я и грешу на шину. 16бит там можно выбрать и вроде бы все ок, а потом смотришь в код, а там 8 бит ))) Может только у меня такая фигня, я хз. Куб вроде последний был. Вообще я крайне разочарован качеством и куба и всего ХАЛа в целом, буду все переписывать постепенно
-
когда я попытался завести АЦП на макс частоте (типа круто) и ADC_SAMPLETIME_1CYCLE_5, скорость обмена по усб упала до 3Hz. Сложно сказать в чем тут была проблема - в самом АЦП (в принципе это ведь штатные для него частоты) и в переполнении какого-ть усб буфера на передачу, но вот факт. Больше всего я грешу, что не хватало пропускной способности самой шины. В итоге я прикинул, что для 1kHz обмена хватит и 9MHz + ADC_SAMPLETIME_13CYCLES_5 для большей точности. CubeMx вообще первоначально не хотел 16бит ставить, это я уже пробовал ручками. Но потом внезапно понял, что по 32битной шине что 16 бит, что дефолтные 32 в любом случае пролезут за 1 такт и оставил 32
-
я же кстати тоже планирую всякие фишки в прошивку засовывать, типа харверного троттл-шейпинга и проч. Может нам как-то одну универсальную общую прошивку пилить? :) Ну чтобы по два раза одно и то же не писать Получил тут кстати на днях персональный VID/PID на pid.codes :)

-
я пытался какое-то время найти его алгоритм, но не смог. Емнис, там еще было завязано на РПМ, что в принципе тоже логично, т.к. при невыжатом сцеплении РПМ связаны со скростью вращения колеса (такое некое косвенное получение скорости вращения колеса в отсутствии нативной телеметрии). Просто получается нюансов дофига. Например, на заднем приводе будем получать скорость вращения задних колес, а если блокируются передние? Т.е. тут еще от ББ получается сильно зависит. Но в целом видимо да, если обрабатывать много факторов в совокупности, то должно работать. По техническим причинам или идеологическим? :)
-
это ты про алгоритм Стефана Тюрпена, который непонятно как (для меня :)) работает? Как кстати по практическому использованию - есть ли всякие нюансы для разных авто/симов ?
-
не получится, специально против таких читеров, иР не выдает необходимую для этого телеметрию :) Для ЛФС можно
-
мне кажется, с десяток таких штук легко разойдутся :) надо только уже готовое изделие предлагать
-
нет, это же баранка только. А они еще анонсировали новую CSL линейку - и базу и педали. Я так понимаю, что эта база на замену GT3/CSR. Спеков и картинок я пока нигде не видел It has been silent for a Little while but we are coming back strong. The production of the CSL Elite Wheel base is starting soon together with the new CSL Elite pedals.
-
Спасибо за комменты по делу ) На самом деле я не завидую любому профессиональному программисту, который набредет на мой код. ))) В свое оправдание скажу, что я там многое собираюсь переписать, например, для конфигурятора пинов всю работу с gpio придется переписать на bare register access, т.е. выкинуть все define. Поэтому я на данном этапе особо к красоте кода не стремился padding, насколько я понимаю, несет чисто эстетическую функцию. Но в дальнейшем при динамически изменяемом кол-ве кнопок он будет мешать. Наоборот, кол-во кнопок в дескрипторе планирую увеличить до 128. SWDIO/SWCLK отключены специально, они полезную работу выполняют
-
Спасибо ) Да, планирую конфигурятор пинов, посмотрим что в итоге получится )
-
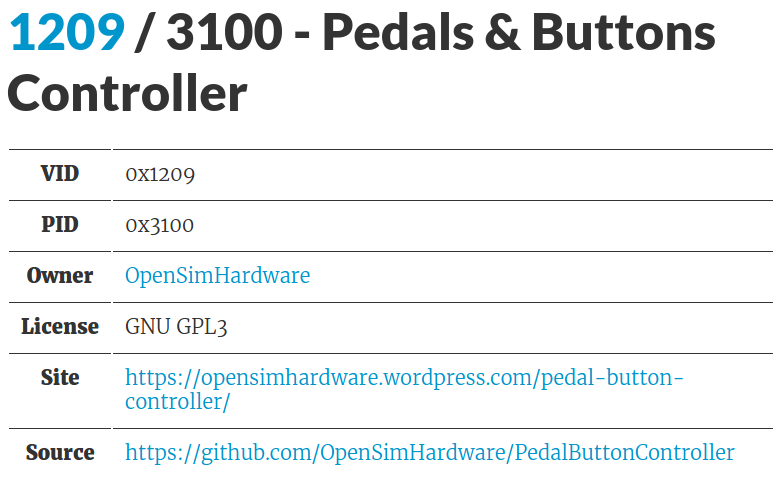
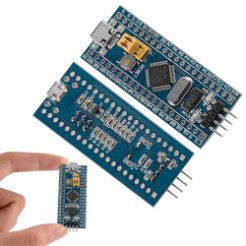
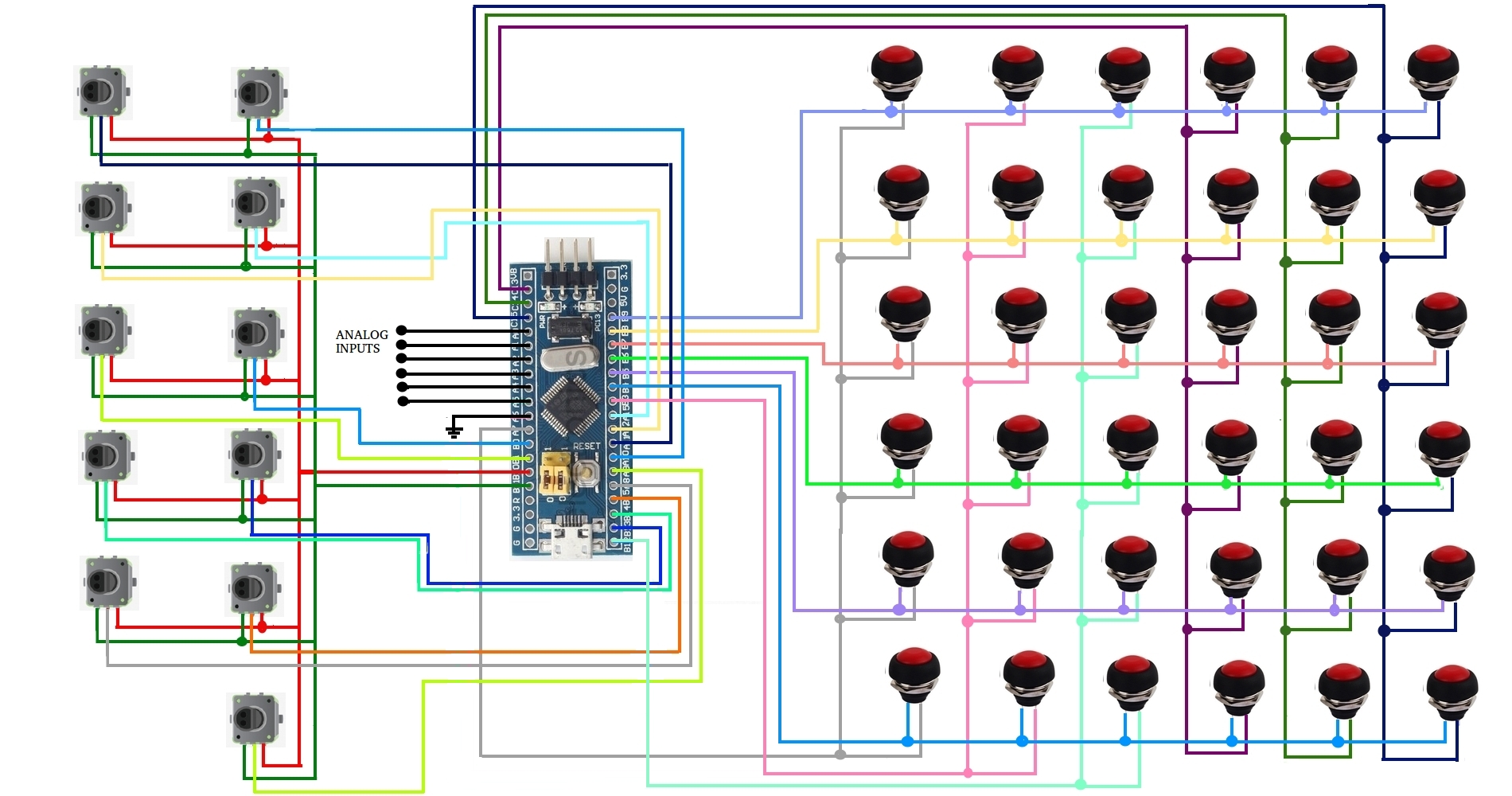
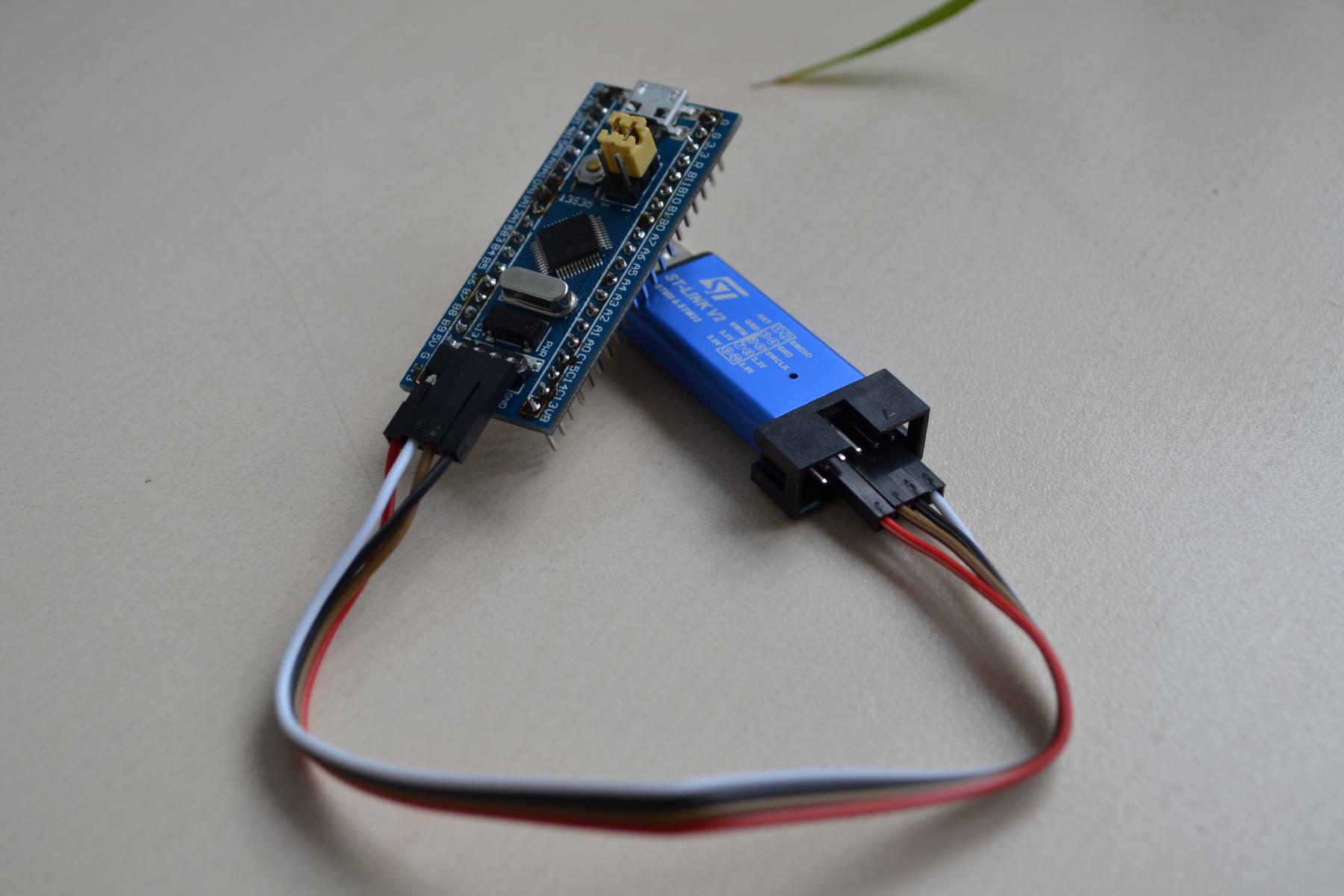
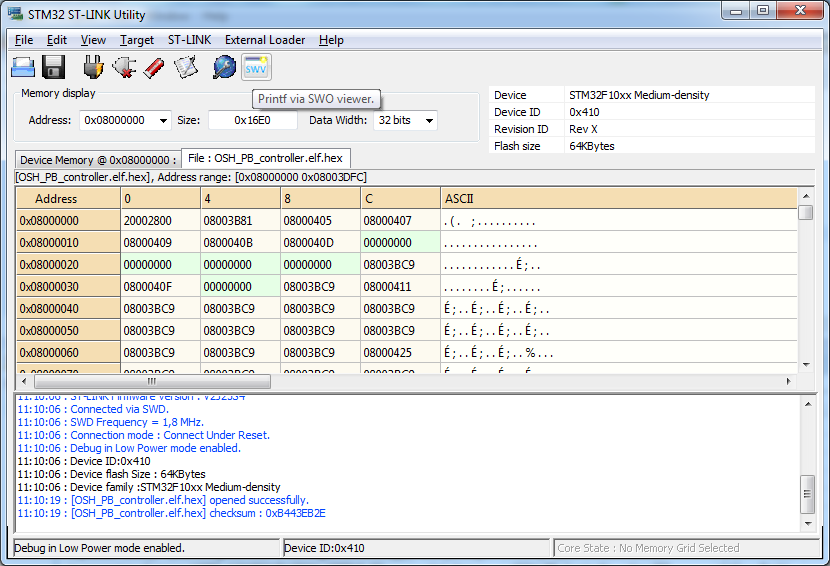
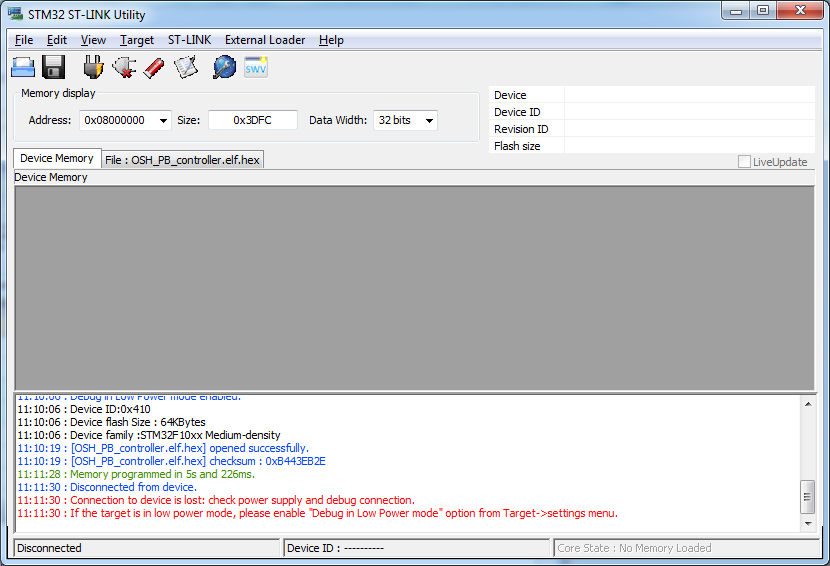
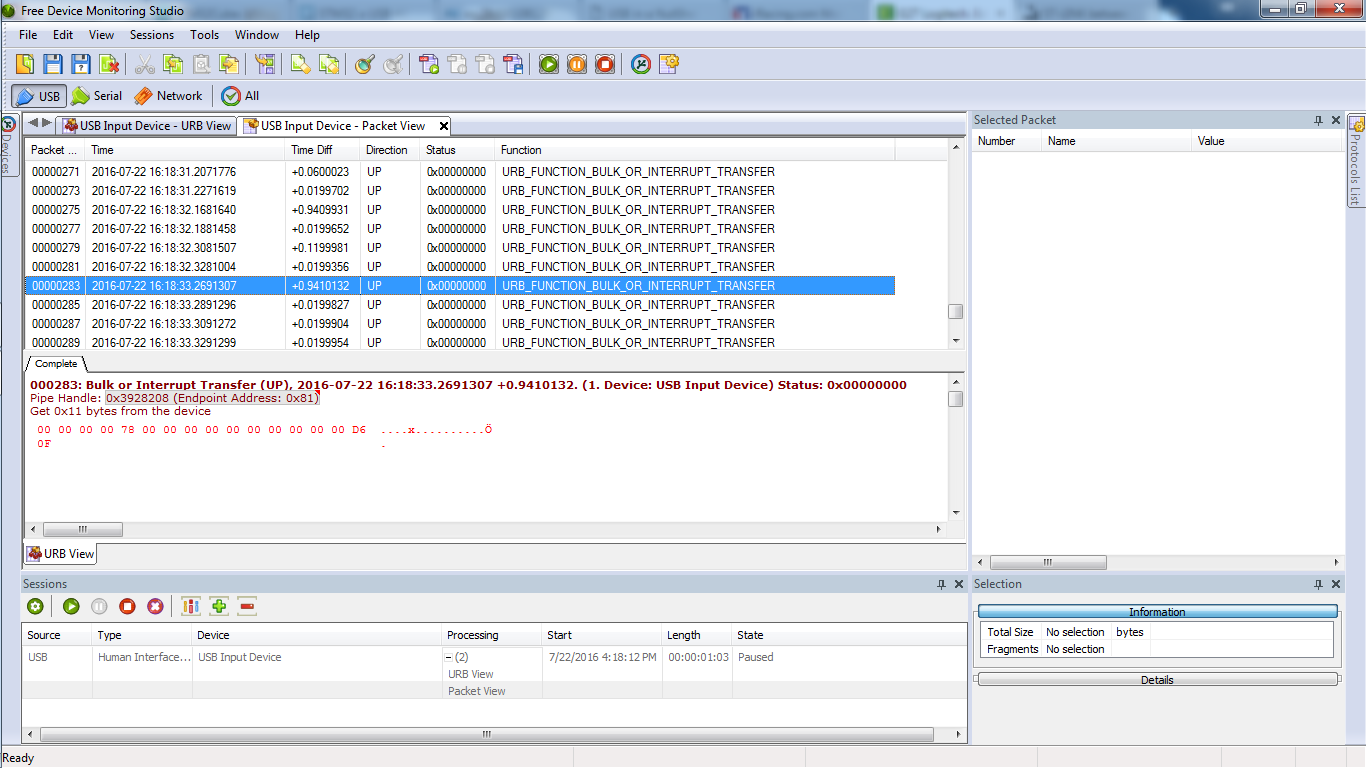
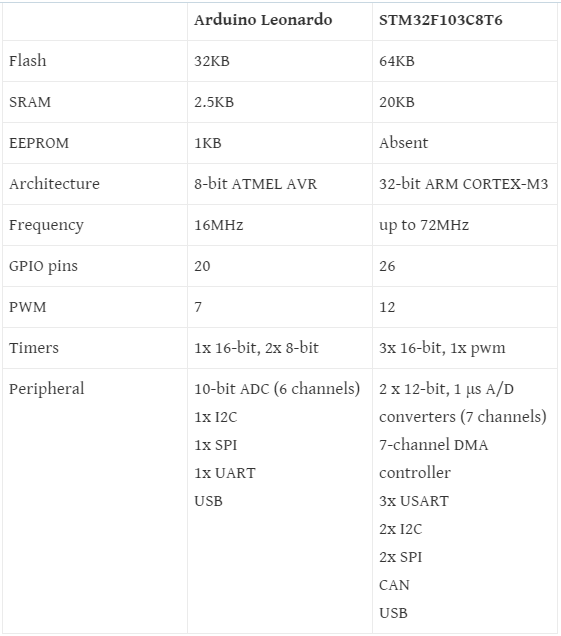
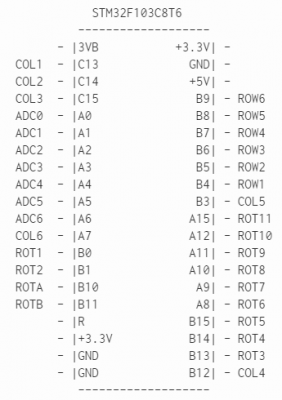
Контроллер предназначен для использования в баттон-боксах, платах на рулях, педалях, для подключения шифтеров, ручников, т.е. для подключения кнопок, энкодеров и аналоговых осей. Возможности устройства (подробнее о спеках еще раскажу ниже): 6х аналоговых осей (12 бит - 4096 дискретных значений) до 36 кнопок до 11 энкодеров 1KHz частота обмена с ПК Со стороны ПК контроллер выглядит как обычный джойстик, установки драйверов не требует. Ну, про всякие кнопки и энкодеры понятно, а к аналоговым входам можно подключать как потенциометры в качестве крутилок (в иР например можно использовать такие оси для некоторых контролов), так и уже готовые педали, т.е любой аналоговый сигнал. Вот например я подключил педали от G27 (разворачивайте на полный экран и смотрите в ХД, иначе ничего не видно): https://www.youtube.com/watch?v=KnnlDYHd0DE Лоад - селлы также можно подключить, но конечно нужен отдельный усилитель. Как его собрать, показано например здесь. После него подключается как обычный аналоговый выход. Для этого проекта я решил использовать не Ардуино, а плату для разработчиков на основе STM32F103C8T6. Вот для сравнения их характеристики: Как видите, STM32F103C8T6 на фоне Ардуино выглядит вполне неплохо, а стоит дешевле. Один из основных минусов состоит в том, что для заливки прошивки в него нужен отдельный программатор, но он тоже недорог. Я покупал все на алиэкспрессе, например вот и вот Выглядят эти штуки так: Схема самой борды ОК, теперь к прошивке. После заливки прошивки, значение пинов борды становится таким (пока это фиксировано): Кнопки нужно подключать матрицей - строки к пинам ROW1 - ROW6 (B4 - B9), столбцы к пинам COL1 - COL6 (C13 - C15, B12, B3, A7). Крайние выводы энкодеров нужно соединить между собой и одну сторону подключить к ROTA (B10), другую - к ROTB (B11). Средние выводы энкодеров - к пинам ROT1 - ROT11. Аналоговые входы - ADC0 - ADC6 (A0 - A6). Последние два входа ADC5 и ADC6 работают в паре - на ось подается бОльшее из двух значений. Неиспользуемые аналоговые входы должны быть соединены с GND! Также я нарисовал картинку, чтобы было более понятно: Ссылка на прошивку Естественно, возникает вопрос - как залить прошивку? Сначала нужно подключить программатор к борде. Четыре провода, все просто - землю к земле, 3V к 3V, DIO - SWDIO, DCLK - SWCLK. Картинка: Затем: Нужна утилита ST-Link Utility, скачать можно отсюда Устанавливаем ее и запускаем. Открываем прошивку File -> Open file, Выбираем Target -> Connect. Внизу в окне статуса утилита должна появится всякая инфа о МК, это значит, что программатор вы подключили правильно и st-link utility определила нашу борду. Картинка: 3. Затем собвственно прошиваем Target -> Program. После прошивки борда "отвалится", это нормально, это значит прошивка залилась корректно и начала работать, т.к. в ней переопределяются пины, используемые программатором и st-link utility больше не может видеть борду. Картинка: Теперь о характеристиках борды, как обещал в начале. Просто приведу сравнение с педалями, которые у меня есть - G27 и Fanatec Elites разрешение осей - 4096 дискретных значений. G27 имеет 256, а Elites - 1024 значений, т.е. по этому параметру этот контроллер не хуже. частота обмена с ПК - 1KHz. Частота обмена данными с ПК - это минимальная latency для педалей. Т.е. она может быть больше, если например АЦП медленно считывает данные или сам МК работает медленнее, но не может быть меньше, т.к. это частота, с которой ПК опрашивает USB - устройство. Если у девайса есть что ответить - он отвечает, если нет - то нет. Ради интереса я посмотрел частоты обмена и оказывается у G27 она - 2мс, а у Elites - 16мс. Фанатек меня тут в очередной раз разочаровал. Затем я вспомнил, что у меня есть ДСД контроллер (12 bit controller with integrated load cell amplifier) и тоже посмотрел частоту обмена. Я просто даже не знаю, что сказать, просто оставлю картинку Т.е. видимо задумывалось, что частота должна быть 20мс, но бывают просадки до 1сек! Только на этом скриншоте их сразу две. И это я собирался поставить в свои педали :facepalm: В целом, вроде бы все. Этот проект получился для меня интересным, поэтому я планирую дальше его развивать. В частности, TODO лист такой: сделать отдельную интегрированную плату со встроенным load-cell усилителем. сделать возможность переопределения пинов, а соответственно и кол-ва кнопок и энкодеров. Т.е. чтобы была возможность сделать например кнопок меньше, а энкодеров больше или наоборот. возможно буду добавлять поддержку других компонент - галетников и т.п., но пока честно говоря, не знаю насколько это нужно
- 215 ответов
-
- 19
-

-
Наверное, Обман? )) http://forum.simraci...=40#entry166892
-
привет, руль калибруется после включения? после включения и калибровки фанатековская программка должен видеть руль в таком положении, в каком он есть. Если ты его покрутишь или понажимаешь кнопки - это все должно отображаться в программке. Если этого не происходит, попробуй перезалить прошивку в руль, она и мануал есть на сайте фанатека
-
у китайцев все как закажешь. Хочешь дешево - сделают дешево, хочешь качетсвенно - сделают качественно, но и цена будет соответсвующая. Сейчас же все фактически делают китайцы. Вот у тебя CSW был - где он по-твоему сделан? :) Понятно, что пример неудачный, потому что и не качесвенно, и дорого :laugh: , но просто как пример продукта европейской компании. Помню, Томас у себя в блоге выкладывал видео как китайцы его клепают, когда руль только к выходу готовился - меня это тогда еще поразило, типа как так, хай енд продукт и китайцы на коленках собирают :laugh: . Молодой еще был, наивный Это же цена для первого встречного с улицы, как я понимаю, да еще и на штучный товар. А в больших контрактах там совсем другие цифры будут. Да и в большом бизнесе первоначальная цена товара не решающий критерий. Дальше же пойдут затраты на поддержку, сервисное обслуживание, куча других факторов, которые нужно учесть. Совокупная стоимость владения решает :) ПС. спасибо, ваш КО :laugh: ппс. настолько взностальгировал, что даже нашел это видео https://www.youtube.com/watch?v=xK7dLJuTRq8&feature=youtu.be
- 23 ответа
-
- 6
-
-
- direct drive
- diy
- (и ещё 1 )
-
в принципе, не совсем с голым, в 5 тыс меловчевки я укладываю какой-ть самопальный 70мм адаптер для баранки, саму баранку (дешевую китайскую) и самопальные крепления для движка к кокпиту. Но в целом - да, цены-то сопоставимы. Поэтому я и говорю всегда, что обычному человеку надо брать АФ, а ОСВ - для гиков, которым интересно ковыряться с железками, а в обмен на отсутствие гарантии и симкоммандера получить чуть лучший с технической стороны (правда неизвестно насколько) девайс. Сейчас GD работают над открытой прошивкой для SimuCube, возможно опираясь на ее код будет проще прикручивать другие серводрайверы
- 23 ответа
-
- 2
-
-
- direct drive
- diy
- (и ещё 1 )
-
т.е. оно получается как минимум не дешевле можно узнать сколько стоит отдельно движок - если меньше 30 тыр, то можно рассматривать, иначе Миге дешевле. по сервоприводу все хуже, т.к. текущая повсеместно используемая прошивка MMos известно, что работает только с продуктами GD. Будет ли работать с этими - хз. Исходников прошивки нет, поэтому если не заработает, то придется самим писать еще и прошивку, а это весь геморрой с DirectInput и т.п. Т.е. допиливания тут непочатый край. Если ужаться по максимуму, то ОСВ не выходит over 1.5$, а все-таки ближе к 70 Кило руб 1. маленький миге - 30 К 2. иони - 25 К 3. БП - 10 К 4. + мелочевка
- 23 ответа
-
- 1
-
-
- direct drive
- diy
- (и ещё 1 )
-
да, все верно. И необязательно покупать у Боднара, можно самому спаять
-
Я поддерживаю Дениса и Славу. С более легкой баранкой меняется скорость реакции. Алексей, можешь снять данные step1 и там все как на ладони. :) По ощущениям разница такая, что я уже не могу ездить со стандартной баранкой, и не надо никаких времён вр и так все понятно :) Лех, если тестишь в ире, то бери авто без ур, например скип
-
у симеров есть два подхода 1 - когда кресло трясется отдельно, называется типа seat mover. Дергающимся относительно всего остального креслом имитируются G силы/перегрузки. Т.е. например, когда при торможении кресло тебя толкает вперед, этим имитируется силы инерции в реальном торможении, когда они точно также толкают тело вперед к рулю. Тело сопротивляется и возникает ощущение действующей силы. Аналогично в поворотах и т.д. 2 - когда трясется все вместе, fullframe. Помимо основной болтанки, тоже есть эффект того, что тело стремится принять вертикальное положение и этим создается ощущение приложенной силы в общем разные подходы. как обычно, одним нравится одно, другим другое, некоторые совмещают ))