Beg
-
Постов
363 -
Зарегистрирован
-
Посещение
-
Победитель дней
28
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Beg
-
 @FredJesk почти все прошивки под ffb рули имеют пины под аналоговые сигналы (оси) для педалей прошивка какая?
@FredJesk почти все прошивки под ffb рули имеют пины под аналоговые сигналы (оси) для педалей прошивка какая? -
Педали от Logitech g25 с модами: - сделан вынос педалей вверх для увеличения линейного хода - установлен Load Cell мод от Best racer с регулировкой усилия - на педали тормоза капролоновые втулки заменены на бронзовые - на педали сцепления установлен газлифт Внутри педалей размещён переходник для подключения в usb (внаружу выведен только usb шнурок, но штатный разъём DB9 сохранен, при необходимости его можно достать и подключить напрямую к базе Logitech) При подключении по usb драйверов не требуется Потенциомеры живые, + есть запасной незадействованый потенциометр на педали тормоза https://www.avito.ru/perm/tovary_dlya_kompyutera/pedali_logitech_g25_modifitsirovannye_2397314046#extended ценник 9.999р
-
@ANGO калибровку холла делал? (может двигатель рассинхронизировался)
-
да, их можно за бесценок найти на барахолках есть, gamma motors PIK12 по цене 255 евро есть варианты с Али например MY1020 - на нем собирают тоже, проекты есть в интернете, но сам лично в руках не держал тесты... ну LUT тут выкладывали, степ тест скорости тоже, крутящий момент озвучивался по реальным сравнениям: ну вот больше разговорное видео, сравнение ДД на 1ПИ12 и DD1 фанатека от одного заядлого симрейсера https://www.youtube.com/watch?v=ZZFDktXXI5U да ничего страшного, все нормально, все правильно
-
@vbc123 проверь целостность шлефа в валу, и не вытолкнулись ли пины из разъёма в базе P. S. : если что у меня есть частично запчасти для csw1: шлейф и плата мозгов, могу продать
-
@NICKRAY https://www.avito.ru/rossiya?q=thrustmaster+F1+force+feedback
-
@Bairachock в плане расчета на изгиб AL профиль 30х30 недалеко от стальной трубы d25х1 (система джокер) ушел имхо - выкинутые зря деньги
-
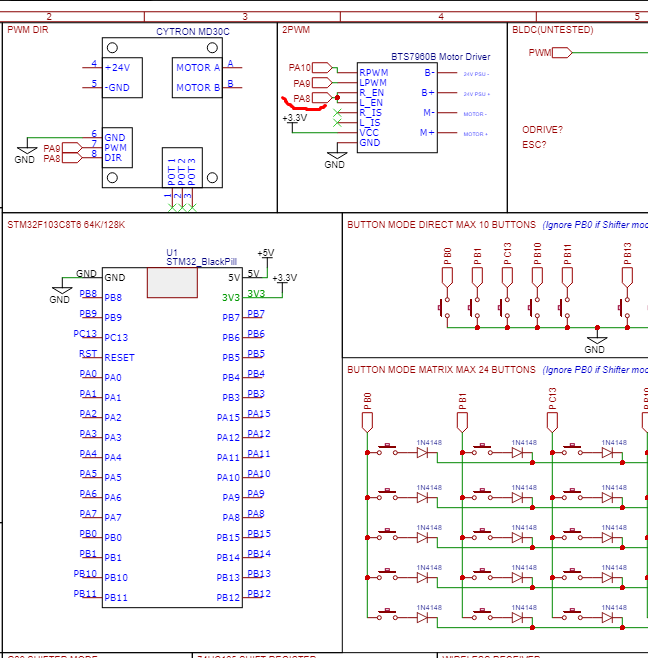
@Vagrant вот на примере Logitech G25 моторы управляются двумя сдвоенныеми мосфетами на 3А вот datasheet http://www.a-power.com.tw/merge_pdf/AP9977GM_Datasheet.pdf ставим вместо них 4 обычных мосфета и вешаем любые моторы единственно не буду советовать очень мощные мосфеты с большой ёмкостью затвора, ибо драйвера полумостов могут не вывезти разрядку/зарядку затворов p.s.: вот на скорую руку нашел в этом же корпусе, можно пробовать впихнуть (но это не точно) IRF8313TRPBF

-
@greaterik007 вот тут есть частичная разборка дд 0.5 а что Вы хотели там увидеть? там обычный синхронно-реактивный 3х фазный двигатель P.S.: вот тут есть полная разборка полноразмерного DD от фанатека не единственный
-
если закрыть глаза и крутить руками отличный момо - то можно его с редуктором от шуруповерта перепутать
-
@m50b20 по этому проекту есть как минимум 2 темы ненадо плодить под каждую повторяющуюся с этого же форума самоделку - новую тему!
-
Сколько Вам платит Thrustmaster за сообщения?
-
@Kabanito сделай замер крутящего момента палкой и безменом А то это все кажется - не кажется пока что не о чем У меня г27 тянул метровую палку с усилием в 0.250кг (на безмене) 2.5нм получается Точнее сказать схемой подключения бп к базе а не мощностью Теоретически возможно что цепи управления силовыми мостами питаются именно от usb И в случае пониженного напряжения силовые мосфеты будут не полностью открываться Но это на грани фантастики)
- 21 ответ
-
- 2
-

-
@propeler ок, я понял тогда можно снять механическую характеристику "тормоза" двигателя с закороченными обмотками (момент на валу/скорость вращения), родобрать зависимость математически и потом принудительно сверху как функцию от скорости наложить сигнал на вращение получится нечто типо имитиции работы электроусилителя руля не соглашусь, в том же иР когда играет подвеска на неровной дороге в повороте с отключеннием драйверов руль отчетливо проваливается в пустоту, с постоянно включенными драйверами такого нет
-
@Sieben да, можно прямо на силовые клеммы на выходе моста повесить 4 диода обратной цепи, хотя в самих мосфетах есть такие же диоды, просто их продублирвать как предохранитель (надо подобрать только по обратному напряжению чтоб подходило) пока в боевых тестах на ДД у народа 5 мостов на irfp4004 - там встроенных защитных диодов хватает но и транзисторы эти жирнее значительно чем 3205/1404
-
@propeler я на моторах постоянного тока тоже боролся с закороченными обмотками, и нашел следующее решение - я отключаю драйверы полумостов в моменты когда ффб = 0, тем самым руль вращается легко и без сопротивления так же например на прошивке EMC - для управления H-мостом кроме двух PWM каналов (лево_право для управления вращенем мотора) есть еще и логичекий канал для включения/активации моста (схема была для ibt2 BTS7960 модуля) видео о том как вращаются мощные коллекторные моторы с замкнутыми и разомкнутыми обмотками этот якобы реалистичный демпинг очень сильно мешает рулить на мощном моторе когда я просто плавно поворачиваю руль - я не могу идентифицировать эффекты ффб вплоть до 10-15% там просто туго и все ну если руль неподвижен, то понятно все почувствуется, но именно в динамике все сливается в одну непонятную кучу
-
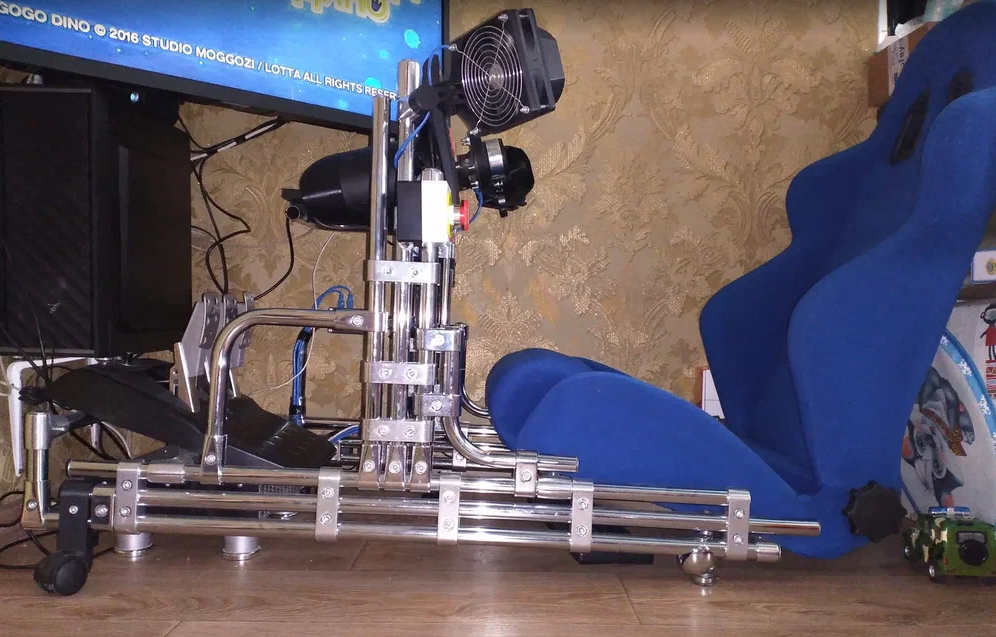
@underdog трубы не покупал (примерно посчитал выходит 8-10к смотря где брать соединели/цены отличаются) что именно не понятно по фото? тут 2 зеркальные боковины, которые связаны поперечными трубами, на поперечных трубах и крепится все оборудование вот откопал фотки с разных этапов сборки - https://disk.yandex.ru/a/_fgS-NRWm3XCbQ
-
@Mutabor вот нечто похожее, только из профиля https://www.simrace-blog.nl/en/formula-sim-rigs-fxu-en/
-
у меня вот не профиль, а труба джокер, и тут у меня конструктивные решения очень сильно влияют на итоговую жесткость рамы - точки крепления кресла находится внутри нижнего пояса - нижний пояс наклонен (для того чтобы укоротить стойки педалей) и да, сижу почти на полу сидуха сзади в 3см от пола ага, если педали внизу - то при торможениях начинаешь вставать на сидухе и очень неудобно рулить на торможениях
-
если вам хочется поднять седло повыше и педали повыше, то логичнее с точки зрения жесткости - поднять целиком нижний связывыющий пояс вверх, а подъем всего оборудования организовать за счет длинных ножек кокпита (если не хотите сидеть на полу) а иначе получается неэффективное использование профиля с точки зрения конструирования рамы, потому что изгибающие моменты большие в виду больших рычагов приложения сил
-
@Kein Engel Zlat а если минфорс убавить? Помогает?
-
@valyta2 здравствуйте, у двигателя в характеристике в данном случае указаны номинальные обороты, которые соответствуют номинальному напряжению а так же номильному крутящему моменту, и между ними есть зависимость, т.е. если мы при номильном напряжении питания отпустим вал (нет нагрузки) - то крутится он будет быстрее указанных номинальных оборотов, и наоборот - если его нагрузить чем то сверх номинала - то обороты провалятся ниже у двигателя есть механическая характеристика, и производитель указывает лишь одну рабочую точку на ней, для примера: (12в / 1000 мин-1 / 1нм/ 10А) и (12В/ 500 мин-1 / 2нм / 20А) может быть один и тот же двигатель и при подключенни его без нагрузки в 12В он возьмет и раскрутится до 4000+ об/мин
-
@KAAbarovsk сразу было понятно что 2й режим мощности активируется за счёт другой распиновки Осталось только выяснить насколько долго хватит слабого бп на увеличенной нагрузке) И так же открытый вопрос Если там токи в 2 ампера то на кой у дд1 блок питания на 0.5 кВт размером с кирпич P. S. : тест с током и мощностью в софт локе считаю не полным Хочется увидеть потребление в резком перекруте руками за софт лок (именно в движении а не в режиме удержания)
-
@_rar а зависает в винде только одна рулевая ось? или все оси/кнопки устройства?
-
@greaterik007 ток в электрической цепи из за индуктивностей не может мгновенно появиться, для этого нужно время (время переходного процесса) У куба программным образом это время сокращается, тем самым он очень быстро умеет выходить на заданный крутящий момент