Beg
-
Постов
363 -
Зарегистрирован
-
Посещение
-
Победитель дней
28
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Beg
-
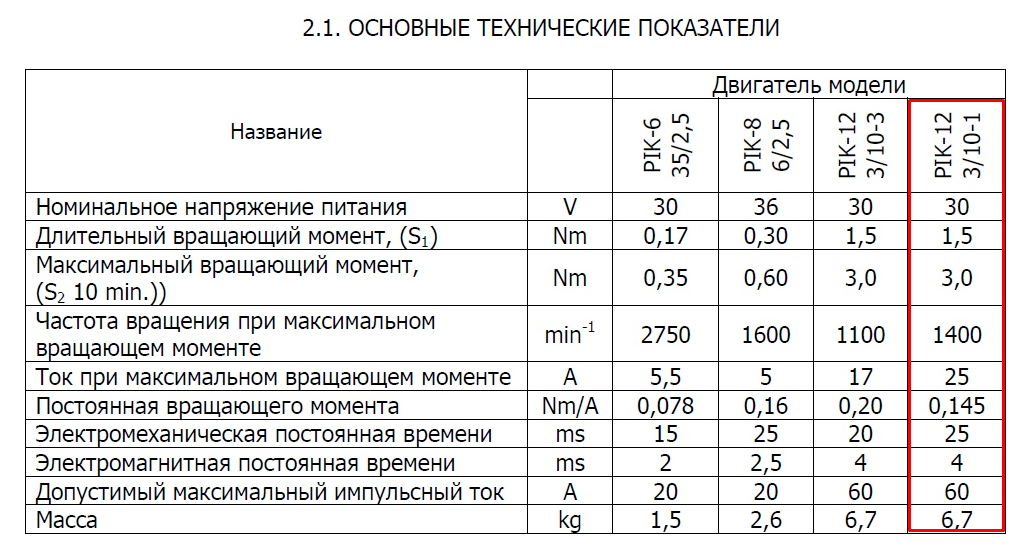
 @Buxou куда такая избыточная мощность? вот я на pik-12 3/10 - 1 собрал на 12 вольтах (питание от АКБ ибп 7,2 а.ч) + 2хBTS получил такие результаты: момент безменом померял - получил 7,2 н.м. вот видео степ теста пока недоделанной до конца базы
@Buxou куда такая избыточная мощность? вот я на pik-12 3/10 - 1 собрал на 12 вольтах (питание от АКБ ибп 7,2 а.ч) + 2хBTS получил такие результаты: момент безменом померял - получил 7,2 н.м. вот видео степ теста пока недоделанной до конца базы
-
пришел ко мне сегодня PIK-12 3/10 - 1 решил помучать его немножко от 12В (АКБ от шурика) холостой ход ~0.75А с китайским апмперметром держим ротор, получаем 1,5кг на рычаге 16см (2.4 н.м.) и ток 16А - провода мультиметра греются, если без амперметра то усилие уже 4 с хвостиком кг (6,5 н.м.) что понравилось - идеально плавный ход, как без нагрузки, так и под напряжением, усилие при "измерении" руками линейно, переключений на коллекторе и магниты не чувствуются совсем p.s. не надо смотреть на бирку что там написано 1,5 н.м. номинала при 30В (это не для нас...)
-
модели есть, но немного кривые, подгонял под печать на своем принтере https://yadi.sk/d/kZzvvn9hO0dKgQ исходники к ним (проект Fusion360) https://yadi.sk/d/PlkgrhOZJ1wQVg вот этот мотор едет ко мне... тут на форуме на подобном моторе была тема
-
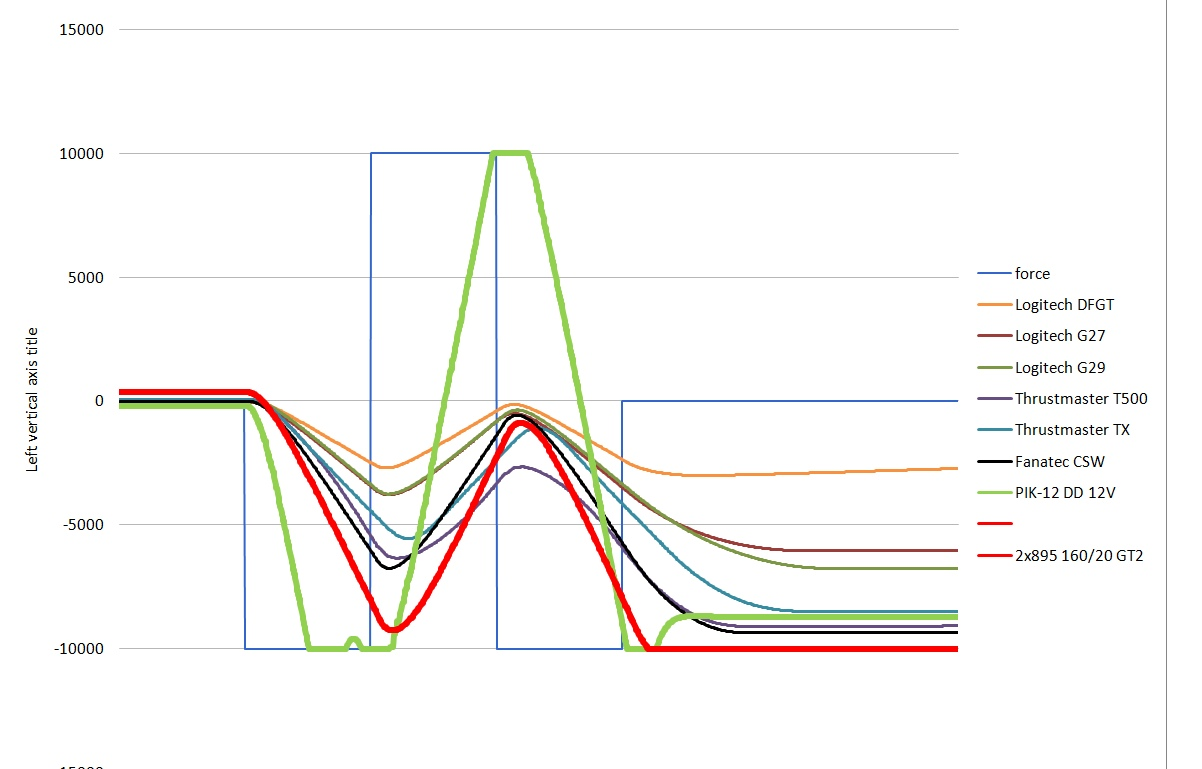
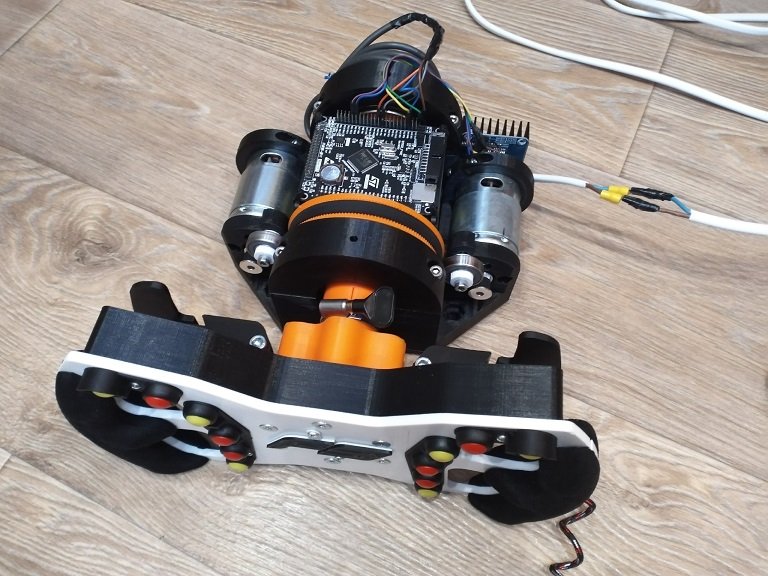
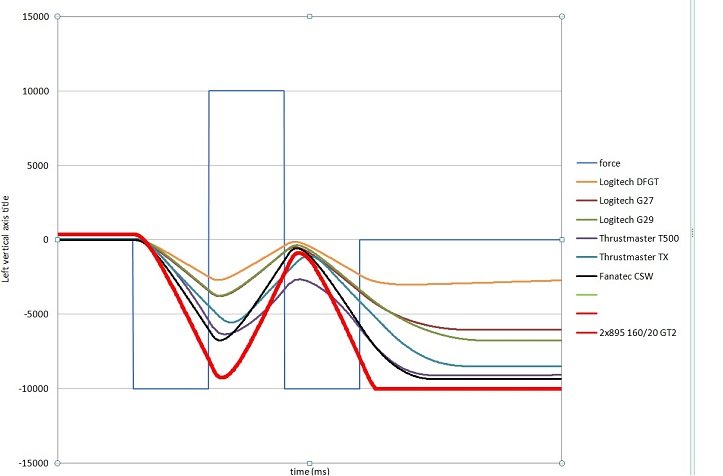
Привет самодельщикам!, собрал я тут свою первую базу, на двух моторах 895 и ремне GT2 передаточное 1 к 8 1. моторы подключил последовательно, питание 24В/16А, 1хBTS на GAG523 (16 kHz) 2. под моторами поставил датчики температуры (на 50гр.) на управление вентиляторами охлаждения 3. корпус выполнен из Petg пластика, вал из PLA 4. энкодер omron с индексом на 600 PPR 5. результат замера момента безменом - 4,2 н.м. немного о минусах) 1. моторы греются сильно и вентиляторы не помогают 2. ремень после непродолжительной эксплуатации внешне поизносился), скоро он кончится 3. "ступенчатость" моторов не получилось победить (895 мотор имеет 10 "шагов", в проекте были применены шкивы на 20 зубъев, чтобы 1 мотор был в промежуточном положении между шагами - проблема не решилась) плюсы: 1. цена 2. тишина 3. высокая скорость базы по сравнению с бюджетными рулями ------ фотки и лог файл) проект дорабатывать не буду, разберу на запчасти уже заказал себе PIK-12 (для ДД)
-
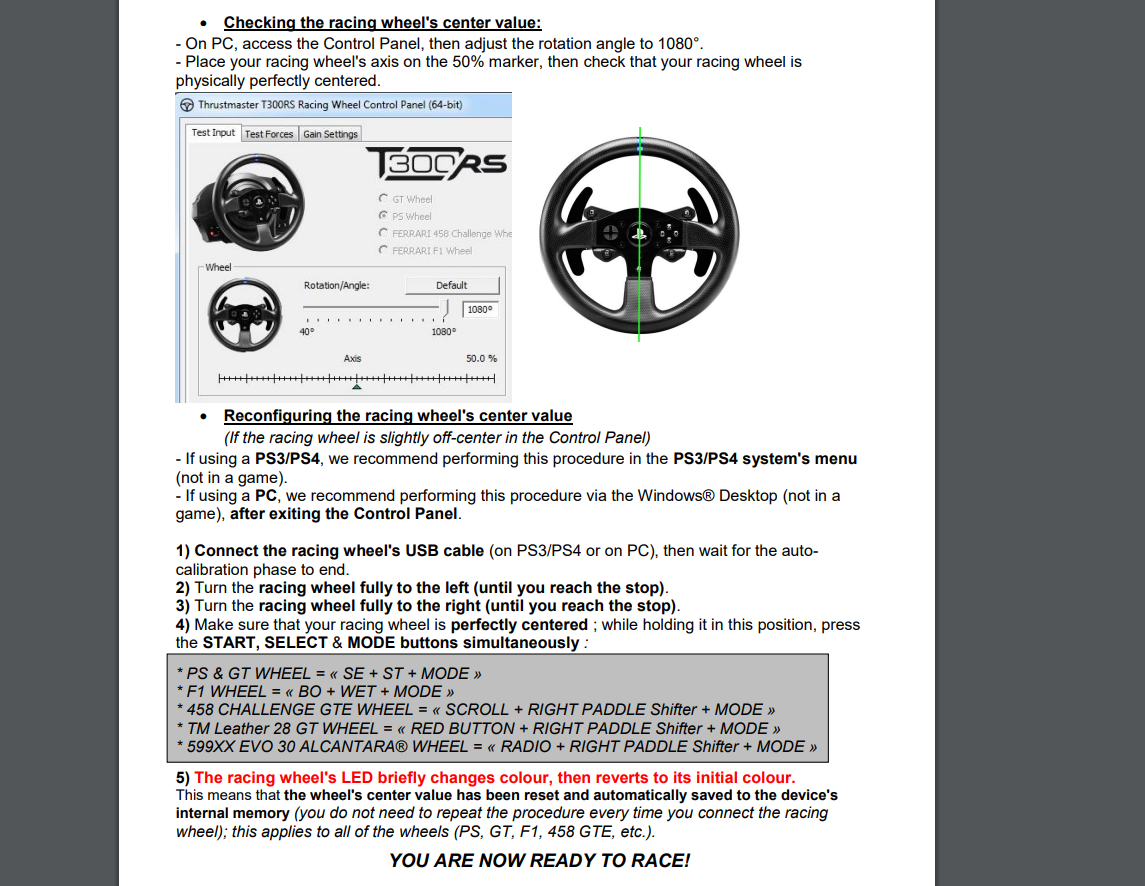
@recier по поводу сбивающейся калибровки советую прочитать тему - должно помочь сломанный редуктор можно поменять (был у знакомого в МСК он (возможно еще не продал) - постучись в личку если, надумаешь ремонтировать) центр на Т300 можно назначать вручную комбинацией кнопок
-
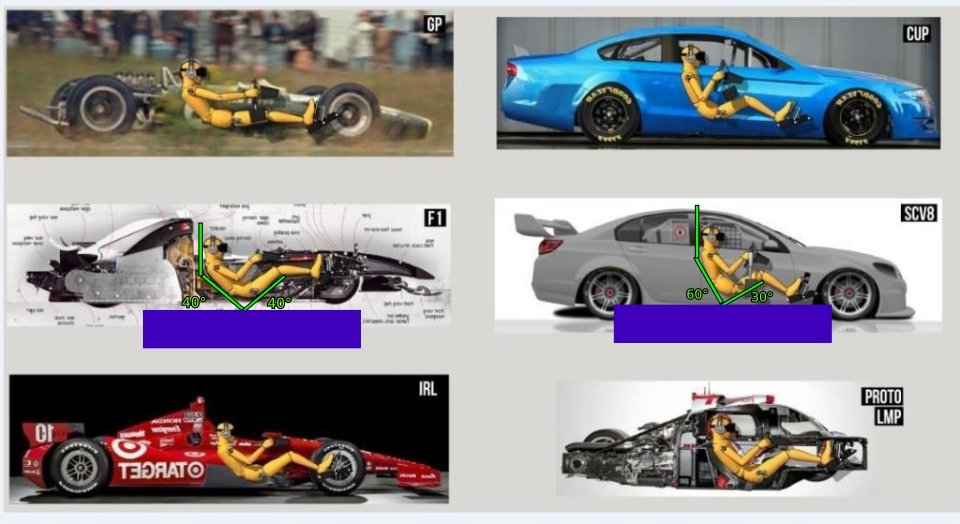
"правильная посадка" за рулем есть только в автошколе на учебном автомобиле... ибо в спортивных авто все очень отличается пилоты NASCAR вообще с рулем обнимаются)
-
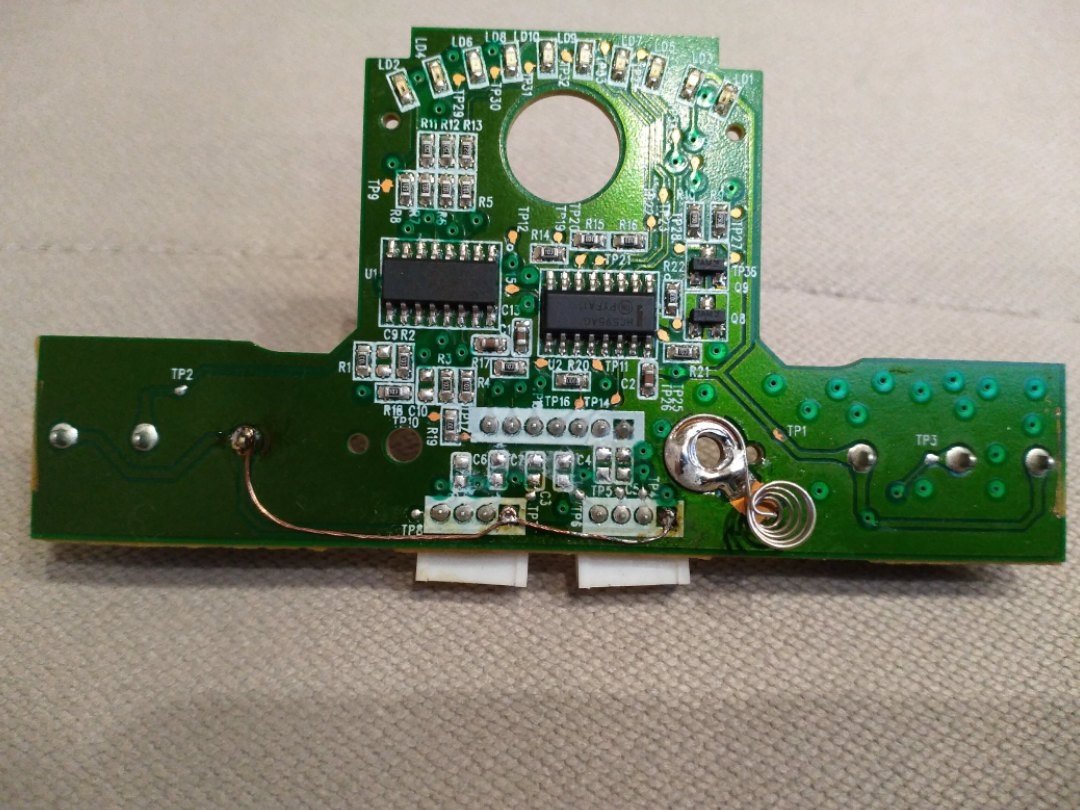
@AlexFed777 проводки эти приходят на плату (а там написано left/right paddle) т.е. это рудимент от Т500 - для подрулевых лепестков, которые раньше были на самой базе, на т150 кстати они тоже есть
-
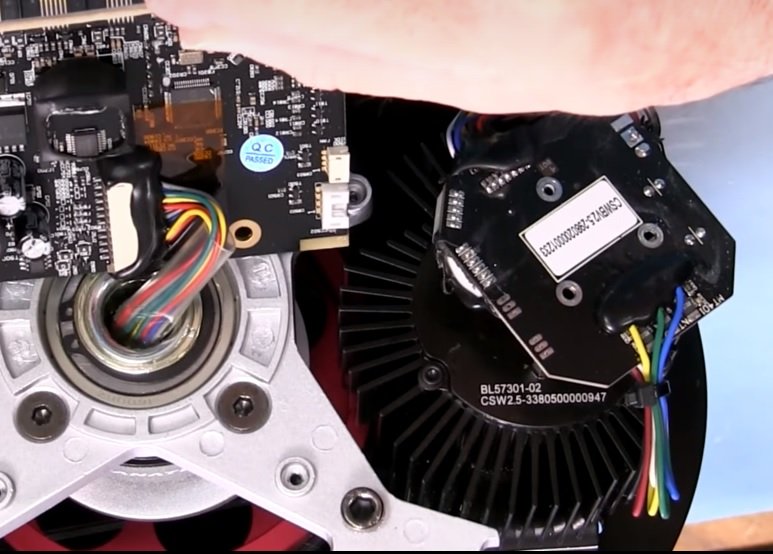
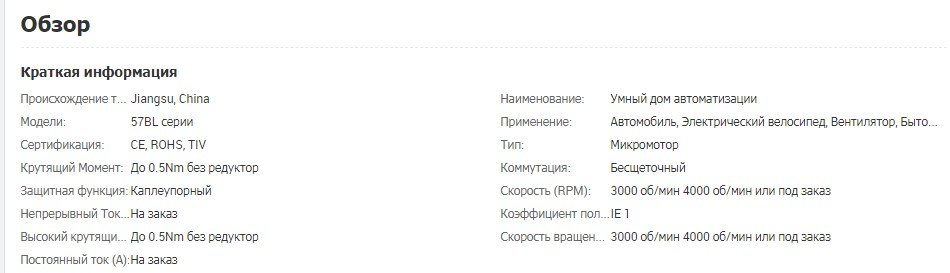
вот, может поможет в поисках P.S., если это серия 57BL, то возможно его характеристики 0,5 Н.м / 3000 rpm (но это не точно)
-
выбирать надо исходя из характеристик мотора, можно хоть 1:1 (DD)
-
там рабочий диапазон изменений сопротивлений +/- 1% проверь сопротивления, между любым сигнальным и любым питающим должны быть одинаковые значения и это, у китайцев бывает что питающий минус это не черный, а белый...
-
@Sieben не так все плохо) мне газлифт на газу все же приятней и понятней чем пружина
-
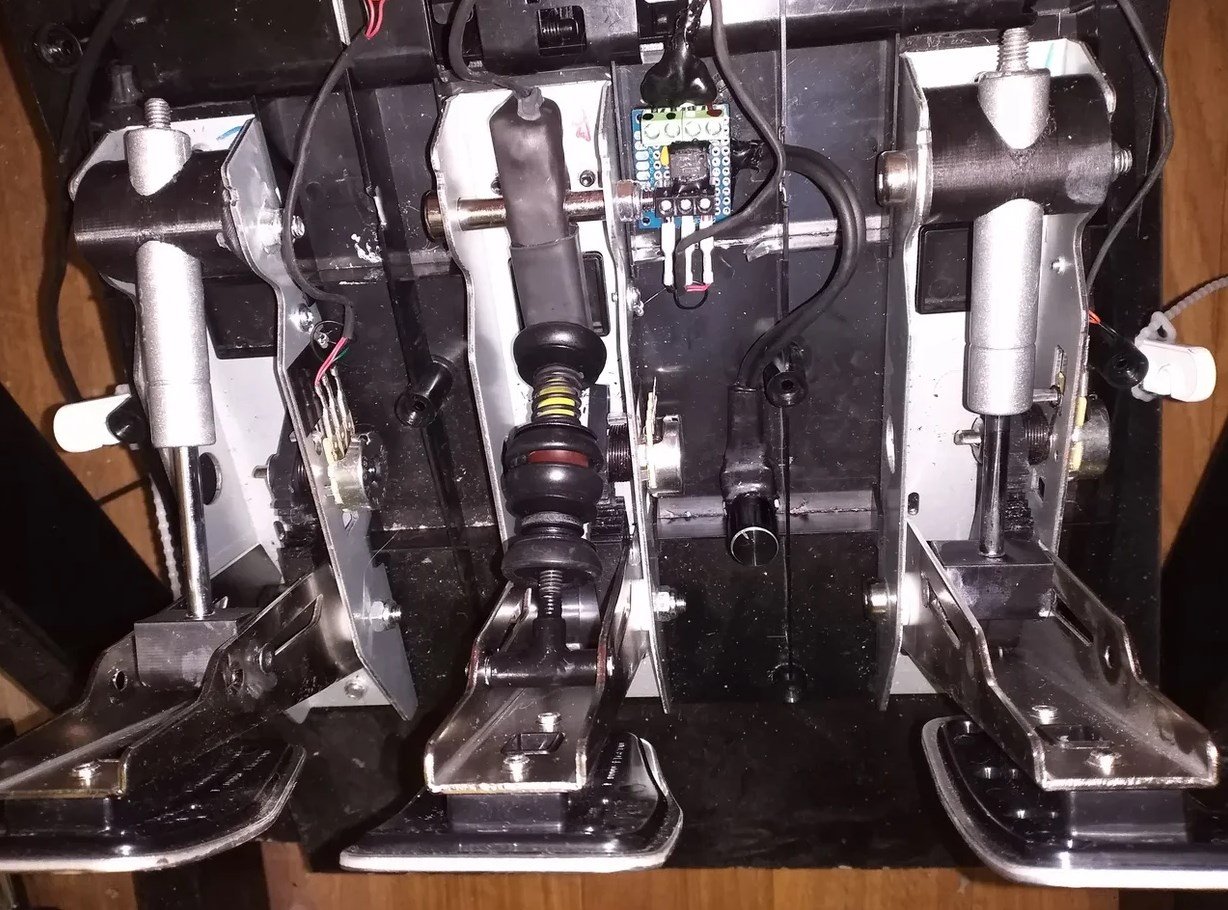
я вот тут покупал load cell mod для педалей G25 http://best-racer.ru/ ну и для газа/сцепы поставил газлифты (напечатал на принтере переходной крепеж) газ и сцепа стали приятней в обращении - стало интуитивно понятней управлять уровнем газа, а вот к тормозу надо привыкать (на данный момент не готов высказать какое то однозначное мнение - но из плюсов - это регулировка усилия в очень широком диапазоне 5-75кг) P.S. газлифт имеет линейное усилие по всей длине хода, и в тоже время хорошо сопротивляется резкому нажатию, т.е. в отличие от пружины которая резко перемещается - газлифт при небольшом превышении его усилия плавно утапливается - получается плавная работа с газом, но так же и есть один минус - газ не бросается резко, необходимо время на возврат педали...
-
поздравляю! эта перемычка по факту принудительно подает питание +5В с правых кнопок на левые кнопки и на лепесток... хотя почему его там не стает я хз... ну вообщем как временное решение пойдет
-
вроде бы вот этот должен подойти https://www.chipdip.ru/product/dm3-03p
-
вспомнил... был у меня странный 27й в ремонте... вроде было все целое но не работал левый лепесток и левые кнопки, я сильно не стал разбираться и заморачиваться, и припаял колхозную перемычку и все заработало
- 41 ответ
-
- 1
-

-
для начала проверить целостность шлейфа-кабеля который от базы к баранке идет
-
теоретически, если принять тот факт, что сцепу сжечь нельзя - то можно сделать чит, который будет слегка буксовать сцепой если расчетные обороты двигателя на данной передаче ниже пика момента, там самым на низких оборотах можно получить прибавку момента на колесах
-
я заказал тут, вроде "правильный" https://aliexpress.ru/item/32819146048.html?spm=a2g0s.9042311.0.0.264d33edsVln00
-
если аппараратно - то поменяй местами фазы A/B и все (на счет программного метода - не уверен) выбирай кондеры изходя из емкости, а не напряжения, либо собирай батарею конденсаторов, либо купи конденсатор на барахолке от автозвука... там на 0,5-1,5 фарада они есть (тем более у тего как раз питание 12В)
-
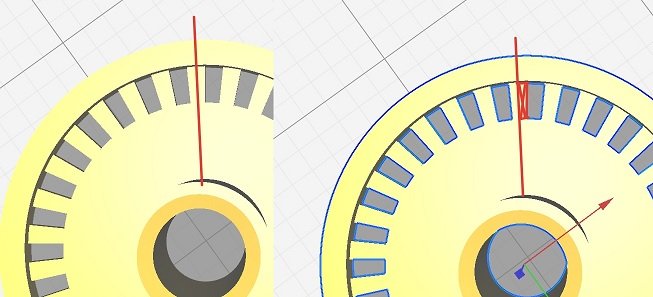
у меня есть положительный опыт ремонта родных энкодеров: 1. их можно клеить (тут главная задача чтобы они на валу не проворачивались) 2. сбивание центра происходит когда трещина проходит через литую перемычку и получается оптические датчики иногда начинают видеть эту трещину как 61ю щель (причем иногда видит иногда нет... из за этого счетчик щелей энкодера перестает соответствовать положению руля со временем), как выход - я срезал кусок пластика если трещина проходила через перемычку p.s.: трещины, которые проходят через окно (и не добавляют новых микро-щелей) ни на что не влияют энкодер трескается от нагрева/охлаждения вала двигателя, издержки конструкции и отсутствие охлаждения...
- 41 ответ
-
- 2
-
-
всем привет, выкладываю свои зарисовки с размерами конструкция из профильной трубы 60х30х2, есть быстрая возможность регулировок, т.к. планировалось все под сферу развлечений (аттракцион) +.pdf
-
-
1. Дмитрий Ожегов 2. РФ, Пермь 3. 30 4. c 2008 с перерывами 5. - 6. проект "SimRacingStudio 59" 7. есть 8. есть 9. есть 10. google.com