Beg
-
Постов
363 -
Зарегистрирован
-
Посещение
-
Победитель дней
28
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Beg
-
 Это почему? У меня например и stm и bts внутри корпуса бп отлично поживают)
Это почему? У меня например и stm и bts внутри корпуса бп отлично поживают) -
@MART привет, не советую использовать моторы с паралельным возбуждением, ибо костыль надо будет придумывать... этотому мотору хоть как +/- подключай, он всегда будет крутиться только в одну сторону
-
@fragma4 привет, я тесты проводил на 12вольттовых аккумуляторах шуруповерта, брал 1 и брал 2(соединяя последовательно) а потом уже принимал решение по напряжению питания еще как вариант поискать БП с возможностью регулировки напряжения - чтобы не ограничивать себя в выборе 12-24
-
@mikis в личку
-
@Markiz были подобные косяки с энкодером - помогла замена usb кабеля на другой Видимо напряжения энкодеру не хватало
-
Мы "ребята из соседних тем" делаем самодельные рули на базе отладочных плат типа arduino leonardo, stm32f103, stm32f407 А прошиваем эти отладочные платы при помощи либо встроенного в плату програматора (в случае с Ардуино) либо отдельного програматора типа St-link (в случае прошивки stm32) А по поводу восстановления прошивки - фанатеки опубликовали только вариант с зажатием кнопки питания на 10 секунд Ну как вариант может сначала зажать кнопку а потом подавать питание и втыкать usb? Ну и там в разных вариациях попробовать...
-
@Phill , @Francyz вот в инете нашел, после переводчика как то так:
-
1. сделать резистивные кнопки (минусы - одновременные нажатия невозможны) 2. притащить через рулевую колонку USB +5В/GND/RX/TX и цеплять руль как отдельный девайс 3. притащить через рулевую колонку только питание +5В/GND и использовать беспроводную передачу данных - в качестве приемника можно использовать либо леонарду с NRF24L01, либо можно прикрутить к MMOS блютуз модуль 4. разместить в руле аккумулятор и сделать беспроводную баранку например на NRF24L01 - у китайцев есть сразу распаяные платы leonardo+nrf, nano+nrf - остается только написать прошивку для приемника и для передатчика руль
-
@Sieben внутри мотора там нет холлов - холл там один, он стоит снаружи сзади двигателя, он используется и для оси Х и для управления двигателем
-
@Sieben на Т300 стоит BLDC 3х фазный двигатель, у которого переключение обмоток происходит по датчику положения (датчику холла) энкодера в Т300 нет.... и в отличие от наших проектов со щеточными двигателями - при изменении положения этого магнитика двигатель на Т300 начнет работать некорректно, т.к. начнет переключать обмотки невпопад совсем, поэтому там надо при помощи сервисной утилиты перекалибровывать датчик холла при снятии установке магнита с вала датчик хола не генерирует импульсы в отличие энкодера - он выдает напряжение в завасимости от магнитной индукции поля если его отключить чуть чуть повернуть и включить обратно - ничего страшного не произойдет в теории, т.е. небольшое перемещение выключенного датчика не сможет пройти незамеченным (если только не на 1+ оборот) вот у человека например происходит несильное смещение магнита ротора с магнитом для датчика и ему приходится перекалибровывать магнит при помощи утилиты и какое то время оно работает нормально, пока снова не сместится
-
если на T300 произойдет смещение маленького магнитика на хвостовике вала сзади двигателя (необходимого для датчика холла) относительно магнита на роторе внутри двигателя - то руль сойдет с ума, будет крутиться не в ту сторону/биться с размаху в опоры и так далее если же ффб работает корректно то с этим узлом все в порядке если сбивается центр - и особенно после резкого ффб (удар в стену/резкая релёжка) то в первую очередь надо посмотреть не проворачиватеся ли зубчатое колесо на валу двигателя так же можно провести эксперимент не разбирая руль: 1. выкрутить ффб на 100500% 2. убавить угол поворота руля меньше 1080гр (например 540 поставить) 3. выкрутить руль за программный ограничитель (софт лок) и там его рывками подергать - и проверить что будет с центром после данной операции
-
@piradik5 1. попробуй поднять мин форс в настройках. 2. Шинные формирователи (микруха so-20) от Nxp корректно работает через раз в таком режиме (как повезёт) - у меня есть удачный опыт установки новых 74hc244 от texas instruments, купить можно в чипидипе по 30р На 16кГц с мин форсом 8-9% все хорошо подхватывается
- 733 ответа
-
- 1
-

-
- mmos
- direct drive
- (и ещё 2 )
-
@KigotixUA имхо под подозрением силовые мосфеты (на плате стоят - вроде на 8 ног - которые около разъема на двигатель) такое чувство что кто то из них не срабатывает
-
@KigotixUA приветствую, очень странный звук работы, а отключенный двигатель механически сам по себе нормально крутится или с таким же звуком?
-
1. он быстро мигает при включении руля - в ождидании индексной метки энкодера, т.е. калибровки 2. в процессе работы базы загорается когда ФФБ достигает максимального значния (упирается в MAX force насройку в MMOS утилите) - т.е. перегрузка @NorbertFosters

-
немного не соглашусь - не все так однозначно, вот например в аккуфорсе стоит обычный nema34, стоимостью меньше 100$ так же пример не из ДД... если выкинуть электронику. то трастмастер Т300 это 2 ремня и мотор за касарь (на али продают) вроде как новый симмейджик М10 тоже на таком же шаговом моторе (но это не точно)
-
@lavletyoung ну при продолжительной работе нагревался до 60 Мотор сам по себе тяжёлый почти 7кг (большая теплоемкость - долго нагревается) Ну и площадь достаточно большая для пассивного охлаждения Класс изоляции по термоскойкости F (до 155 градусов можно жарить)
-
согласен, у меня на ХХ ток был ~1А, а в софт локе 50А
-
@igoren174 нет Питание - 220В, 50Гц.
-
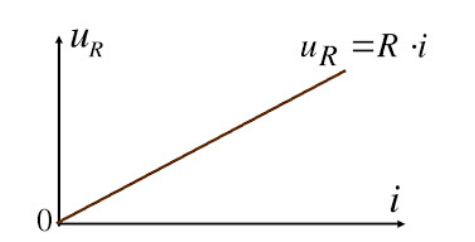
С темы не съезжай Как у тебя сточий мотор в 100 % силе при 12 вольтах потребляет 13А, а при 22 - 7А? Ты правда хочешь сказать, что если я просто добавлю напряжения на своём БП, то у меня не увеличится максимальный момент? Я так понимаю ты сейчас с законом Ома споришь? То что "для обеспечения такой же мощности" - речь идёт о механической мощности, которая равна (обороты) х (момент) при меньшем напряжении да, будут меньше обороты, и надо снимать большой момент с вала А на высоком напряжении мы снимаем меньший момент и получаем меньший ток, при этом да, вот твоё постоянство мощности и обратная зависимость тока от напряжения Я тебе ещё раз напишу что ток, потребляемый двигателем прямо пропорционален сумме из (механические потери) + (полезный крутящий момент) Больше ток - > больше момент. Иди почитай учебники что такое сила ампера и как и почему работет электродвигатель. Удачи.
- 733 ответа
-
- 1
-
-
- mmos
- direct drive
- (и ещё 2 )
-
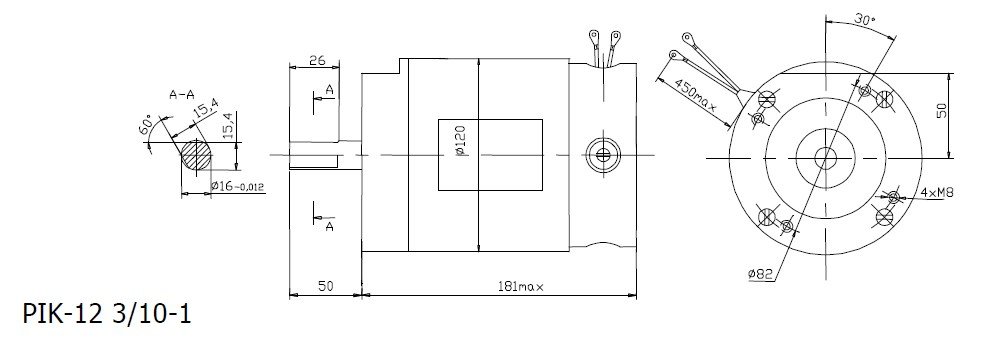
@Sieben да я понял твои тесты, нол тогда попробуй объяснить мое видео выше, так почему же при увеличении напряжения питания момент на заблокированном валу двигателя увеличивается? у тебя свое видео, у меня свое, и у тебя не чистый эксперимент, ты крутишь настройки на компе, двигатель подключен через H-мост, да и скважность ШИМ походу не доходит до 100% ибо я еще раз говорю, и буду говорить что - чем больше напряжение мы подаем на "заклиненный" двигатель - то тем больше будет момент на валу, и тем больше будет выделяться тепловой энергии ~ в квартатичной зависимости а давай для примера возьмем коллекторный мотор постонного тока (любой), заклиним его и снимем его вольт-амперную характеристику! есть у тебя лабораторный БП с плавной регулировкой напряжения чтобы в этом убедиться? уверяю, что на постоянном тока получится подобный график если не веришь - подключи напрямую свой MY1025 на свои 24/22 вольта - померяй и ток и напряжение p.s. у меня кстати китайский мультиметр с амперметром с током до 20А дает большое падение напряжения на токах >10A ну и получается что мотор с последовательно включенным амперметром дает ощутимо меньший момент чем без него p.s. p.s: я свой PIK12 подключал к БП (24В/16А) и он работал почти нормально... и момент в софт локе давал около 4,5-5 н.м. только при этом напряжене на БП садилось с 24 до 9-9,5 Вольт (защиты в БП нет)
- 733 ответа
-
- 1
-
-
- mmos
- direct drive
- (и ещё 2 )
-
1.остановленный мотор будет потреблять ток = напряжение/активное сопротивление иначе как можно на MY1025 при напряжении 1В обеспечить 150 А току? и что? мотор сможет такой ток потребить? 2. у моторов с возбуждением от постоянных магнитов есть такая характеристика, как "постоянная крутящего момента" в размероности н.м./А - показывающая соотношения потребляемого тока и момента на валу к примеру на PIK12-3/10-3 она равна 0,2 н.м./А, что означает - что при потреблении 10А тока момент на валу будет 2н.м. и так далее если не дать мотору нормальное напряжение, то и ток он брать не будет =) тесты проводились на разной частоте... я не понимаю как может мотор тянуть 520g/m и при 7А и при 13А одновременно... давай договримся что 100% gain = 100% скважность ШИМ, что эквивалентно прямому присоединению БП к мотору (без BTS) и тогда твои тесты и слова (если я правильно тебя понял) можно трактовать как: "я подавал и 12В и 22В на мотор, в итоге получил одинаковую мощность на стоячем моторе и одинаковый момент на валу, который не зависит от питающего напряжения" вот например мой тест на коленке: (сорян за мат, снимал не для форума... ) БП регулируемый в диапазоне 4-27В, ток максимальный до 80А, мотор 1ПИ12 (на 60В) - ток я не мерял очевидный результат теста - при увеличении напряжения - пропорционально увеличивается и момент на валу однако твои тесты выглядят как будто момент не должен зависеть от питающего напряжения и при увеличении напряжения ток должен падать, потому что мотор всегда и везде же будет брать мощность (0,55кВт) а момент должен оставаться на одном уровне... даже если ток упал и сила магнитной индукции упала, ( она прямо пропорциональная току в соленойде) но у тебя по прежнему сила отталкивания соленойда (катушки ротора) от магнита такая же - чудеса прямо
- 733 ответа
-
- 1
-
-
- mmos
- direct drive
- (и ещё 2 )