Beg
-
Постов
363 -
Зарегистрирован
-
Посещение
-
Победитель дней
28
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Beg
-
@Tim_99 есть 5 официальных версий Т300 1. T300RS (баранка Gran Turismo) + 2х педальный блок 2. T300RS (баранка Gran Turismo) + 3х педальный блок 3. T300 Ferrari GTE (баранка Ferrari GTE) + 2 х педальный блок 4. T300 Ferrari Integral Racing Wheel Alcantara Edition (баранка Ferrari алькантара 30см) + 3 х педальный блок 5. T300 Racing Wheel Servo Base (голая база без баранки и педалей) по поломкам - чаще всего попадались проблемы с двигателем (отрыв магнита) - если что новый мотор ~1к рублей с али, ну еще бывают ломается мех. огничитель (но это как правило сдествие неисправности мотора, т.е. он с размаху бъется в стопоры), так же еще бывает изнашивается штатный вентилятор (и начинает дребезжать) электроника надежна, умирает редко, датчик положения бесконтактный (тут датчик холла) - в отличие от логитеков (кроме G29) не ломается) вобщем слабое место - двигатель TS-PC (аналоги T-GT/TS-XW) имеет мощнее мотор, толще ремни, редуктор с меньшим передаточными соотношением (т.е. руль быстрее и "прозрачней") - конструктивно аналогичен Т300
-
 del
del -
@dvkokh этот софт рабоатет только с 3х фазными бесколлекторными двигателями, двигатель постоянного тока тут не заведется симкуб прошивка опять же поинтересней оно работает чем MMOS + бесколлекторный двигатель
-
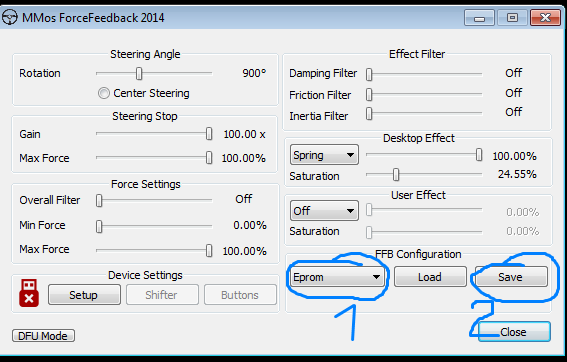
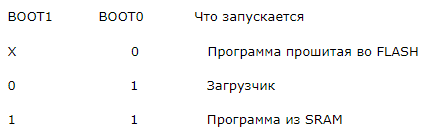
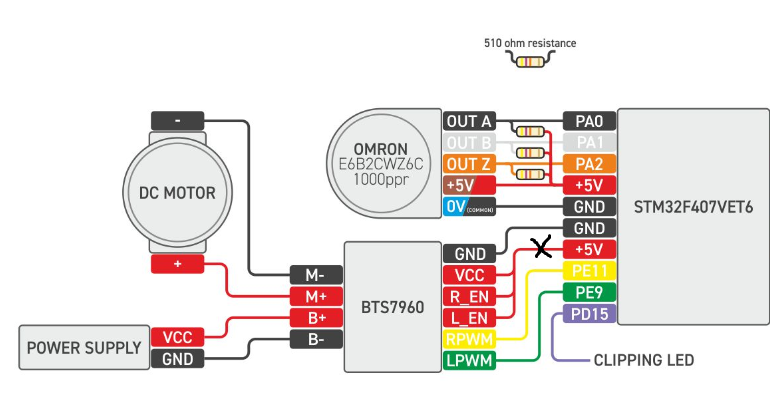
@dvkokh Для управления загрузкой контроллера существуют два вывода BOOT1 и BOOT0 (BT1/BT0). В зависимости комбинаций логических уровней на них, контроллер при включении питания начнет выполнять код из разных областей памяти. Это видно из таблицы ниже:

-
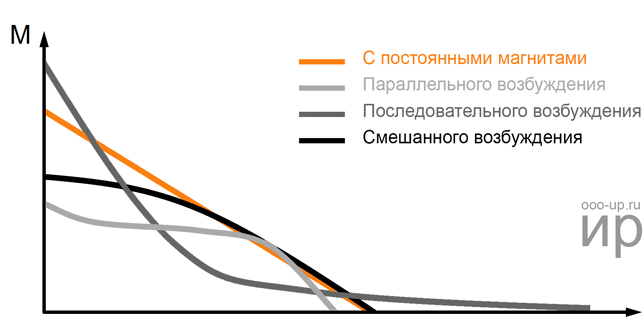
@Sieben Вы сами же любите ньансы, поэтому поехали 1. причем здесь вообще "Руль 1.4 кг"? из курса школьной физики напомню - что массу можно использовать как меру инертности в линейном движении!, во вращательном же движении мерой инертности надо считать именно момент инерции (если Ваш руль 1,4кг превратить в тонкий стержень, то и всю "инертность" он потеряет и раскрутить его станет очень легко) 2. я ничего не понял...тут все в кучу - момент софт лока, и масса руля? и почему то скорость вращения и момент на софт локе? и потребление снова откуда то притянуто это откуда придумано? чтобы руль массой (1,4кг) вращать со своростью в 220 - на валу передается 5 нм? или у Вас всегда на валу 5 н.м.? 2.1 руль не будет постонно потреблять 144 Вт - у меня (от 12В) в софт локе около 60А, в свободном вращении (холостой ход) - 0,8А 2.2 механическую мощность надо считать по другому, надо уже определиться...: 2.2.1 либо мы его держим (сопротивляемся в 5н.м.) и он все равно крутится при этом со скоростью 220 мин-1, тогда да - вот вам 115 полезных ватт мощности - да блин симер руками не развивает какую то вменяемаю мощность представьте 100 Вт = поднять 10кг на высоту 1м за 1с (силу да, можно создать, но именно мощность - не согласен) ... проведи экмперимент - загони свой руль в софт лок и максимально быстро попробуй его провернуть дальше и потом надо умножить момент софт лока на угловоую скорость в рад/с - получится "механическая мощность рук" 2.2.2 либо надо считать момент на ускорение самой баранки, т.е. момент инерции умножать на угловое ускорение (а не говорить про массу и скорсть) 2.2.3 я повторюсь но! : - в софт локе мех. мощность = 0 (вся мощность в нагрев) - *когда скорсть вращения мала или равна нулю - мы входим в поворот, да блин пусть хоть сопротивление 5н.м. (а это на минуточку 33 Н касательно к 30см баранке ) мы плавно поворачиваем руль со скоростью не более 1об/с = дак это 31,4 Вт, тогда почму у нас блоки питания в 12В/50 А иногда уходят в защиту то? где тут пол киловатт? 2.3 у коллекторных двигателей есть механическая харектеристика, момент у них линейно зависит от оборотов вращения, т.е. момент, измеренный в софт локе - он максимальный, момент при максимальной скорости (условно ХХ) = 0 3. Касательно двигателя прямого привода, который используется в скростях от -5% до +10% от номинальной - у него кпд все равно около нуля, это не рабочая зона двигателя электродвигатель начнет работать с приемлимым КПД - когда у него скорость вращения выйдет в рабочий диапазон p.s.: срач ниочем... поэтому и результата не выходе не будет
-
1. какая стоит частота? пробовали уменьшать? 2. можно замерить значение min force при помощи wheel check и вписать близкое к нему значение в настройках
-
@Sieben да, момент на валу есть - а скорости вращения толком нет... к примеру 5н.м. при 1 об. в секунду = 5x1x2п = 31 Вт механической мощности... я думаю электрическая в этом случае будет наверно раз в 10 больше, поэтому я и говорю о около нулевом кпд когда потребленная электрическая мощность хорошо превосходит механическую мощность (полезную мехаханическую работу отнесенную ко времени)
-
не мерял, но у него же переменная нагрузка - блок питания сейчас 400Вт, если бы он мотал как чайник - то он бы уже задымился... по факту же руль практически не выполняет полезной механической работы, двигатель почти всегда "стоит", кпд стремится к нулю - т.е. и потребленное электричество почти все идет в тепло
-
доработки которые повылазили (на ближайщее будущее): 1. блока питания не хватает - хотя у него и нет защиты, но у него проваливается напряжение - как бы он не сдох 2. BTS горячие - надо дорабатывать их охлаждение, штатного не хватает 3. Решил я пойти "против шерсти" и использовал длинный кабель между BTS и мотором - 3метра, ПВС 2х1,5 - он собака греется, я так понимаю что тут на лицо скин эффект (это когда на высокой частоте ток отказывается течь внутри сечения проводника - а течет только по поверхности... т.е. сечение жилы используется не все, а только его "скорлупа", толщина этой "скорлупы" на синусе 16kHz - 0,5мм, а на ШИМ с малой скважностью и того меньше "но это не точно") - но отступать некуда) надо попробовать запитать "резиной" КГхл 2х4 - она заодно и температуру большую держит
-
Довел свой проект условно до законченного состояния, можно эксплуатировать.... конечно есть проблемы и небольшие косяки - ну их чуть позже решим вот мини обзор записал
-
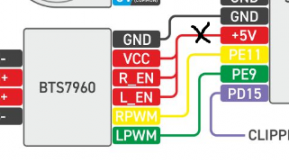
я отключал именно как на схеме нарисовано (смотреть на черный крест) отключил пучок VCC+REN+LEN от +5В пина STM, сам же пучок VCC+REN+LEN я не размыкал ок, если мы с одного выключателя включаем 2 лампочки - их можно считать синхронизированными? по поводу длинны, это не критично - допустим 10см - разница длинны, электрический сигнал пройдет за 0.33 нс(наносекунд) дольше допустим у нас ШИМ с частотой 16kHz, и скважность в 1%, он даст исмпульсы длительностью в 625нс итого условно получаем "рассинхронизацию" на каких то 0,05% поэтому считаю утверждение по поводу одинаковой длинны ошибочно и некритично аккуратно запаивать к пинам провода тоже необязательно, главно обеспечить надежный контакт с низким переходным сопротивлением
-
@piradik5 @Lexins вот снятое видео для демонстрации предыдущего поста по поводу пустоты в 30 гр. в центре - у меня такого нет, я проверял значание minForce в WheelCheck - оно и так и так 9%, т.е. мотор начинает двигаться при одинаковых значениях ШИМ так же замечу, что этот эффект "легкости" заметен лишь при полностью выключенном FFB, когда же прилагается какой нибудь %FFB - "легкость" соотственно сменяется силой фитбэка и разницы я не чувствую
-
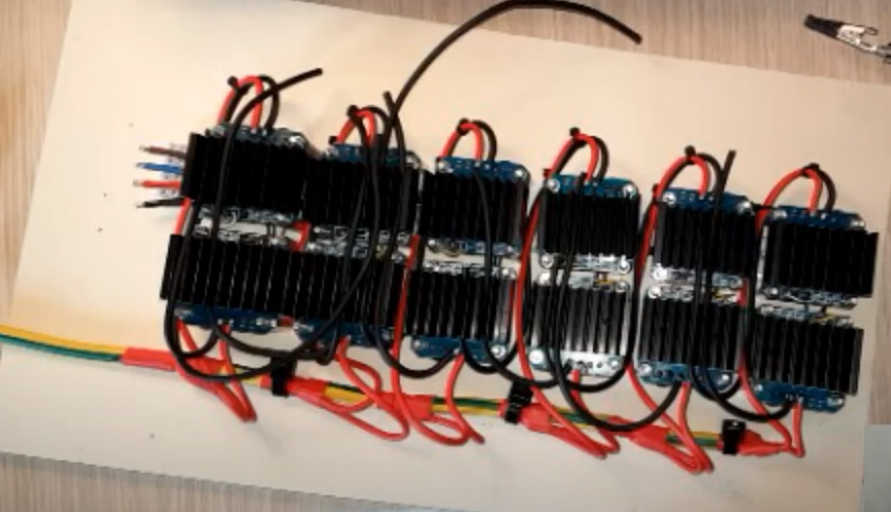
я подключал 2 BTS в паралель пин к пину как есть GND к GND RPWM к RPWM LPWM к LPWM и силу так же шим на них синхронизруется, поэтому их можно паралелить сколько хочешь... единственный момент - мне не понравилось, что при подаче +5В на контакты VCC, R_EN, L_EN в BTS - выходные силовые пины (M+ / M-) и закорачиваются меж собой и коллекторный двигатель при этом в свободном режиме туго вращается (как замкнутый генератор) - вообщем я VCC оставил неподключеным
-
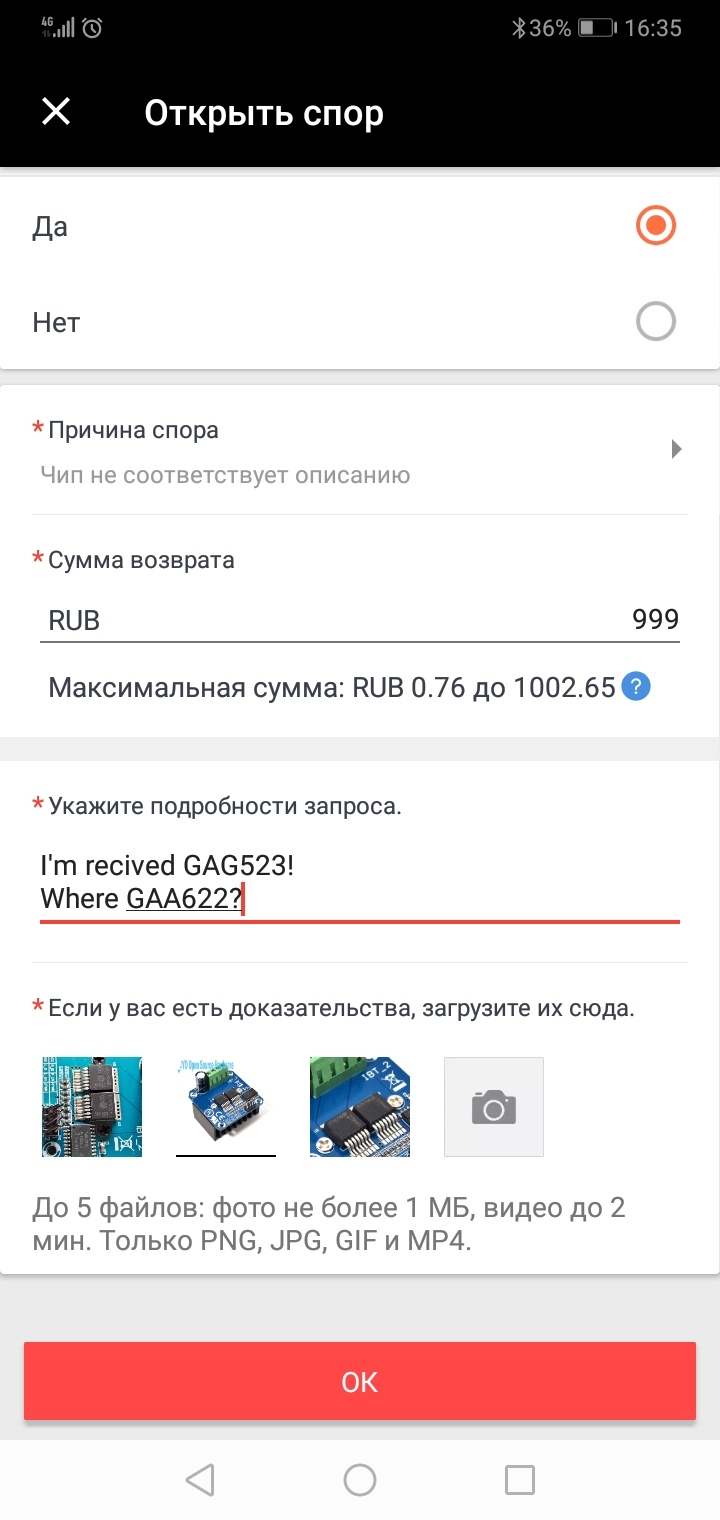
@dvkokh у меня на картинке на ali были нарисованы 622 чипы, а по факту пришли 523... сразу открыл спор, на возврат 99% стоимости BTS работают нормально, претензий к ним нет так что советую поступить так же
-
вот я минфорс настраивал у себя и снимал графики линейности смысл в том, что до 8% гейна двигатель ничего не чувствует... поэтому и добавляется min force
-
@Basma4 у меня без энкодера был, я омрон с индексом на 600 PPR поставил плохо искал! есть двигатели) https://youla.ru/novosibirsk/remont-i-stroitelstvo/ehlektrika/eliektrodvighatieli-postoiannogho-toka-30v-5acf080b2138bb1e971cd0d2
-
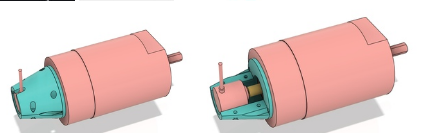
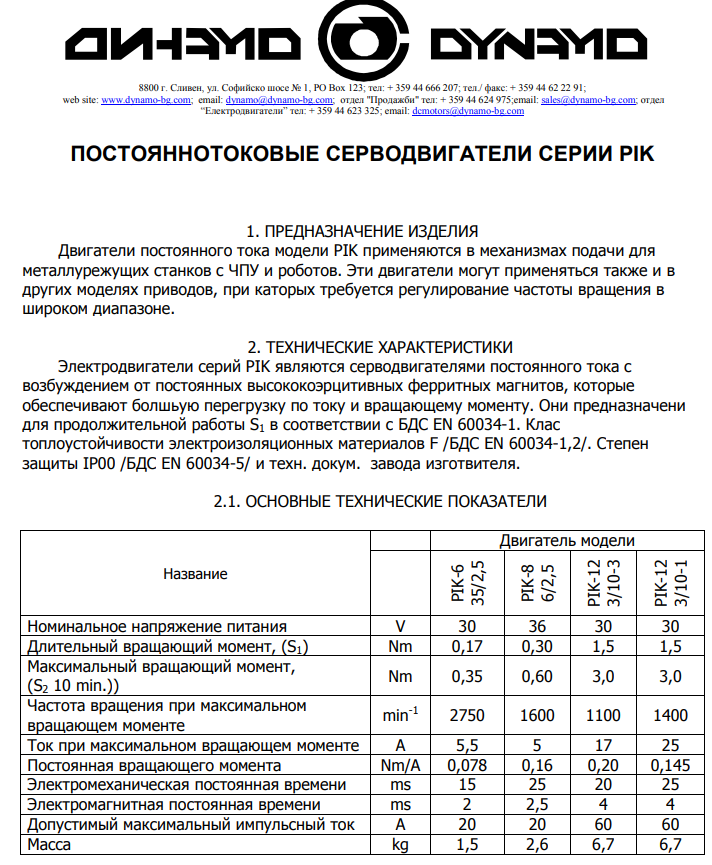
@Basma4 я перешел на двигатель pik 12-3/10-1, у него каких либо ступенек и переключений между обмотками ротора я не чувствую, вот он прям очень плавный и линейный сборку базы я почти закончил... скоро выложу инфу, а пока так
-
@Sieben либо я непонятно выражаю свои мысли, либо ты меня не понимаешь, я ж написал про !калибровку! а не про потерю центра в работе!\ напишу еще раз! я согласен что не важно куда ставить энкодер, в каком передаточном соотношении он будет работать и даже в какую сторону работать! вообще не важно, я пишу про то, что в таком случае ИНДЕКС энкодера не получится задействовать для режима !автоматической калибровки! и придется при каждом включеннии - вручную мышкой ставить галочку и назначать центр @Basma4 лог записан с интервалом не в 1мс, он выглядит как лог с шагом в 2мс
-
@Sieben просто ты меня не понял) я про то, что индекс энкодера для калибровки использовать корректно не получится (придется после каждого включения платы - назначать центр), а энкодер да, будет работать PPR умножить на передаточное число и все...
-
1. прямой привод, даже на DC моторе очень тихий... по уровню громкости - да я чешусь наверно громче чем руль крутится 2. должно работать, только тогда неккоректно будет работать индекс энкодера, т.к. центр руля будет не только в 0 положении а еще и при других градусах (при передаче к примеру 1 к 3 - будут центровки по индексу в углах 0/120/240/0)
-
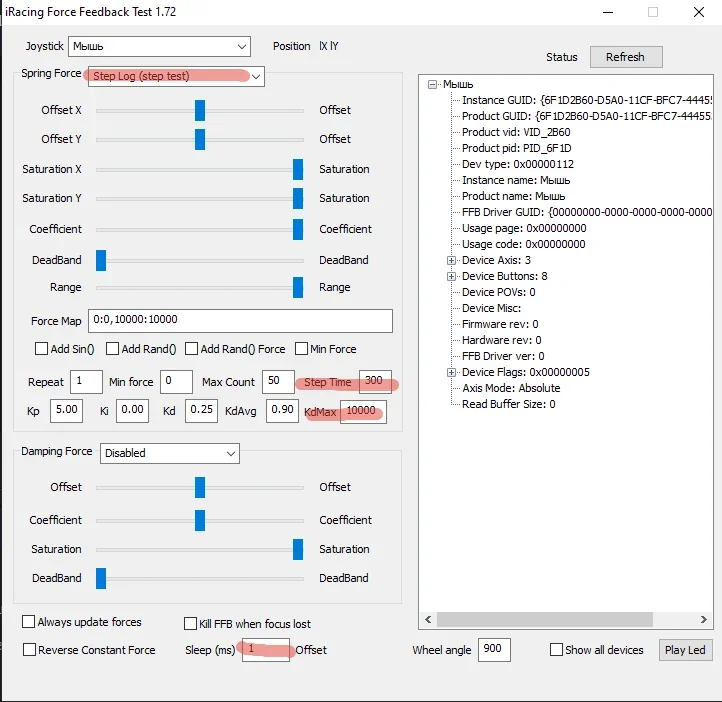
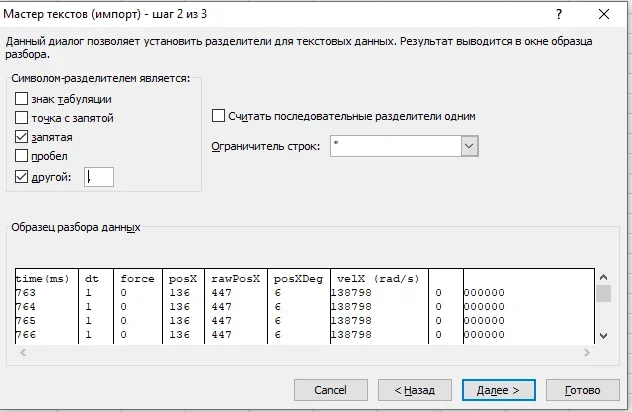
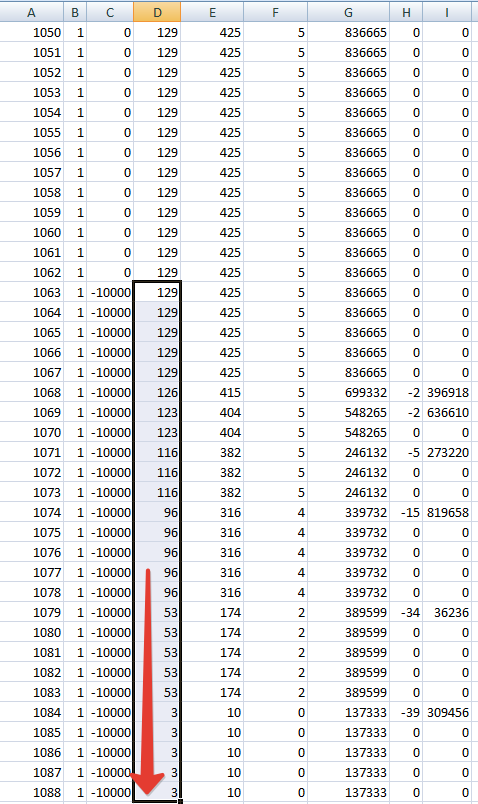
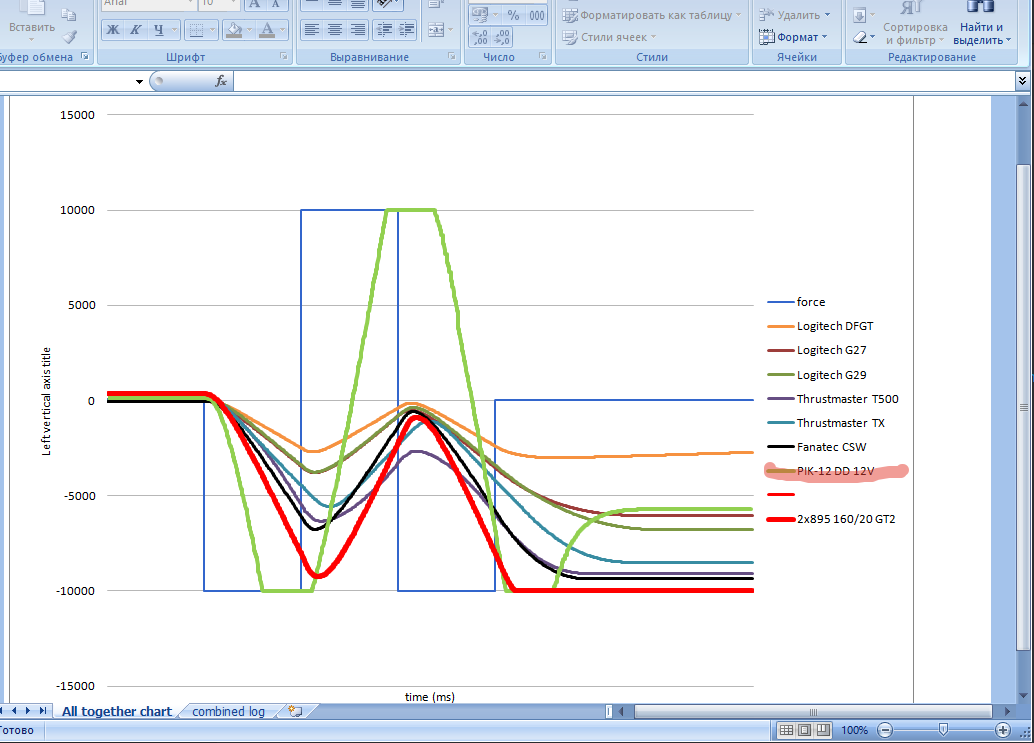
@Basma4 в видео услышал вопрос по поводу графиков) 1. проводим тест на стандартных настройках wheelcheck "step Log (step test)" 2.в папке "документы" в винде появится csv лог файл с названием типа log 2020-06-29 22-01-48.csv 3. открываем excel, раздел данные - из текста, и выбираем свой csv файл в проводнике формат данных - с разделителями, далее - символом разделителем является запятая и другой (там ставим точку) далее/готово -вставляем данные на лист дальше надо скопировать столбец "D" до конца с того места, как в столбце "С" появилось (-10000) дальше надо взять файл https://yadi.sk/i/hTVH80JPDfdstQ в нем вставляем начиная от сюда и ниже наши значения а выше - можно просто растянуть сколько там было до этого к примеру у меня было "129" - значит растянем "129" и если мы все сделали правильно, то тут должен появиться график с названием из верхней строки P.S.: особое внимание следует обратить на исходный csv файл, у меня были баги - когда время начинало сбоить и пропускались строки лога т.е. в импортированном csv логе должно быть около 2000 строк +/-
-
1. кто б дал мне двигатель с идеальными скоростными характеристиками? )) 2. а по существу - высокая скорость - показатель "пологости" механической характеристики привода, т.е. на небольших скоростях вращения крутящий момент падает незначительно, т.е. быстрый руль умеет и тянуть и крутить одновременно к примеру какой нибудь G27, с максимальной скоростью чуть больше 1 оборота в секунду - при вращении по направлению FFB со скоростью 0.5 оборота в секунду выдаст всего лишь половину своего крутящего момента... быстрый DD же может крутить и тянуть одновременно... причем сила FFB не сильно зависит от того что мы делаем с рулем - держим/крутим/рывком дергаем и т.д. 3. с большой и тяжелой инертной баранкой скорость работы упадет, на видео лёгкий пластиковый штурвал 280 мм 4. момент и скорость руля всегда можно убавить, я на видео показал "максимальные возможности"