Sieben
-
Постов
1159 -
Зарегистрирован
-
Посещение
-
Победитель дней
26
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Sieben
-
 Хм. В EMC там ppr вписывается как 1600, с 400ppr энкодером. Для MMOS, надо было внести CPR как 400. Если 1600, то там бред получался, энкодер приходилось крутить фигову тучу раз.
Хм. В EMC там ppr вписывается как 1600, с 400ppr энкодером. Для MMOS, надо было внести CPR как 400. Если 1600, то там бред получался, энкодер приходилось крутить фигову тучу раз. -
Это вряд-ли. ) Но очень интересно конечно будет глянуть на результат с высшими передаточными под этот мотор. Он может быть совсем медленным тогда. А блок питания какой?
-
Piradik 5, Та про драйвер который я сам запилил. Жди бтс, не парься) А где увидел?
-
19nm не 19nm, но тебе хватит с таким мотором) Ну а по оборотам всё равно будет просадка. Как бы там не было) Опять же, было на первой стр. темы.
-
Тады жди другой бтс. Могу конечно посоветовать diy драйвер. Но ты ж не будешь его собирать. Плюс, надо бы убрать от туда реле, и обычный мост поставить. На сильных настройках ffb, по центру скорости переключения реле слеганца не достаточно, что бы не было осцилляций в центре. А так всё гуд.
-
Syava, на валу руля, должно быть 200 об\мин. как минимум. Этим можешь и ориентироваться. Смотри на пример каравана, по факту его оборотов, уже были расчеты, и они совпали и без опубликования тестов до этого.) Есть расчёты и по другим движкам. Зайди в мою тему, если не был. Там полно данных с тестов. Включая и g25, и серво DD. И тут они были тоже. Насчёт не меньше 10нм, ты не совсем прав. Fanatec если не ошибаюсь, 5-6 nm. Ессесно ДД никто сюда не сравнивает. Уже достаточно есть, разных сборок, на разных моторах, уже можно было бы и вникнуть, проанализировать)
-
Как она называется? . .p.s. всё сорян, подобрал. CR1220.)
-
Piradik5, у тебя в стм батарейка есть? Воспринимают. Дело не в этом. Они не такие мощные по идеи получаются просто итд. А там их фиг разберёшь, что им надо. Пинка в любом случаи)))
-
Не поверишь, она тоже была здесь.
-
Тут была инфа, что с такой нумерацией, bts фуфел. А эти типа норм. https://www.xsimulator.net/community/threads/diy-force-feedback-steering-wheel-using-dc-motor-based-on-mmos.13019/#post-174094 Ну может чисто имхо автора) Хотя вот с такой же нумерацией как он указал, (GAG523) как раз они и навернулись. )
-
Слушайте, а какая батарейка нужна для stm? Или вообще не нужна, и только для проектов если часы делать на нем? Влияет ли на запоминание настроек?. Потому что, после переподключения, надо заново выставлять значения итд. Хотя вроде в eeprom не сохранял и так может только поэтому))?
-
Ну можно перепрошить. Хотя это уже наверно тоже было сделано. Ардуины Лео нет рядом?
-
Классная база. Если пробовал разные настройки, то вполне возможно, проблема всё таки только в самом драйвере там. Больше похоже на это. BTS 7960 не все одинаково полезны.
-
-
Зависимость значения выставленной частоты pwm и музыкального сопровождения, пора бы уже давно понять)
-
В моей 10ка, с соединительными гайками. Очень прочно. Переходник 10 на 6. Идеально подходит)
-
Есть такой вариант базы. Piradik5 Ну там пока есть, кое какие, непонятки. По dd на тех моторах, который обсуждаете. https://www.xsimulator.net/community/threads/son-of-opensimwheel-an-experiment.7422/ https://www.xsimulator.net/community/threads/cousin-of-osw-open-sim-wheel.10915/ https://www.drivingitalia.net/index.php?/forums/topic/76596-volante-direct-drive-con-arduino-stm32/#comments
-
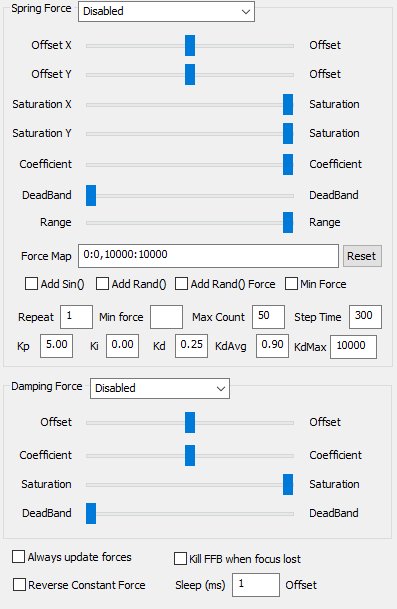
Нашёл такое описание этих параметров в wheelcheck. Само по себе оно к другой проге. https://www.xsimulator.net/community/threads/smc3-arduino-3dof-motor-driver-and-windows-utilities.4957/ Kp The proportional term of the PID loop. Essentially the larger the value here the “harder” the SMC3 controller will try to drive the motor to bring it to its target position. It is scaled by the distance away the motor is from its current target position, again the further away the harder it is driven (within the constraints set by other parameters) This is typically the main tuning parameter and the greatest effect – this can even be used alone with Ki and Kd set to 0. The setting will be very dependent on the motors, H-bridges, and mechanical loads however values in the range 300 to 500 would not be uncommon with the SMC3. Allowed values range from 0-1000. Ki The integral term is useful to help get the steady state error closer to zero. Generally speaking for sim designs I have found that if you have large enough PWMmin and Kp values the need for Ki is reduced and it can often be set to 0. Too large a Ki can cause the position to overshoot and oscillate. Kd The derivative term is great for reducing overshoot on fast step changes in position... The negative effect is that it can slow down the movement particularly when the target undergoes a step change.

-
По части осцилляций, "руль по центру" в тестах, симе, если выкручивать максимум constant/gain, небольшое изменение в схеме подключения flyback диодов. Минусовую часть диодного моста видимо нужно было подключать просто к минусу напрямую. ) Так работает гораздо лучше. Но без диодов там никак. Уже проверенно, сгоревшими без них TVS). Чисто к слову, поставлены именно 1,5KE33A, вместо 1,5KE18A как были).
-
Кажется если делать на 550/750 итд им не нужен БП на 20+ ампер. В G25ых там блок 24v и около двух ампер.
-
В emc есть слайдеры множители для Constant, spring итд. В тесте крутящего момента, выкрутив их на max, расплавились провода в реле) Но были заменены, и тест на видео выше это уже с доработанным много-амперным реле)
-
Да здравствует, матиматике, кибирнетике! В смысле в тесте с рычагом в один метр, получаем всё теже - 0,7 кг, ровно как и было, с перерасчётами выше. ) Получаем 7 Nm. Пользовался вот этим калкулятором. Это если лень умножить на индекс, перерасчёта кг в Ньютоны) https://www.translatorscafe.com/unit-converter/RU/moment-of-force/1-8/newton meter-kilogram-force meter/