Sieben
-
Постов
1159 -
Зарегистрирован
-
Посещение
-
Победитель дней
26
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Sieben
-
 А говоришь, какая там механика))
А говоришь, какая там механика)) -
Боюсь с механикой придётся поработать по любому) Родного выхода вала с обратной стороны мотора нет. ) Но есть такие решения тоже. )

-
-
Показывай обязательно.
-
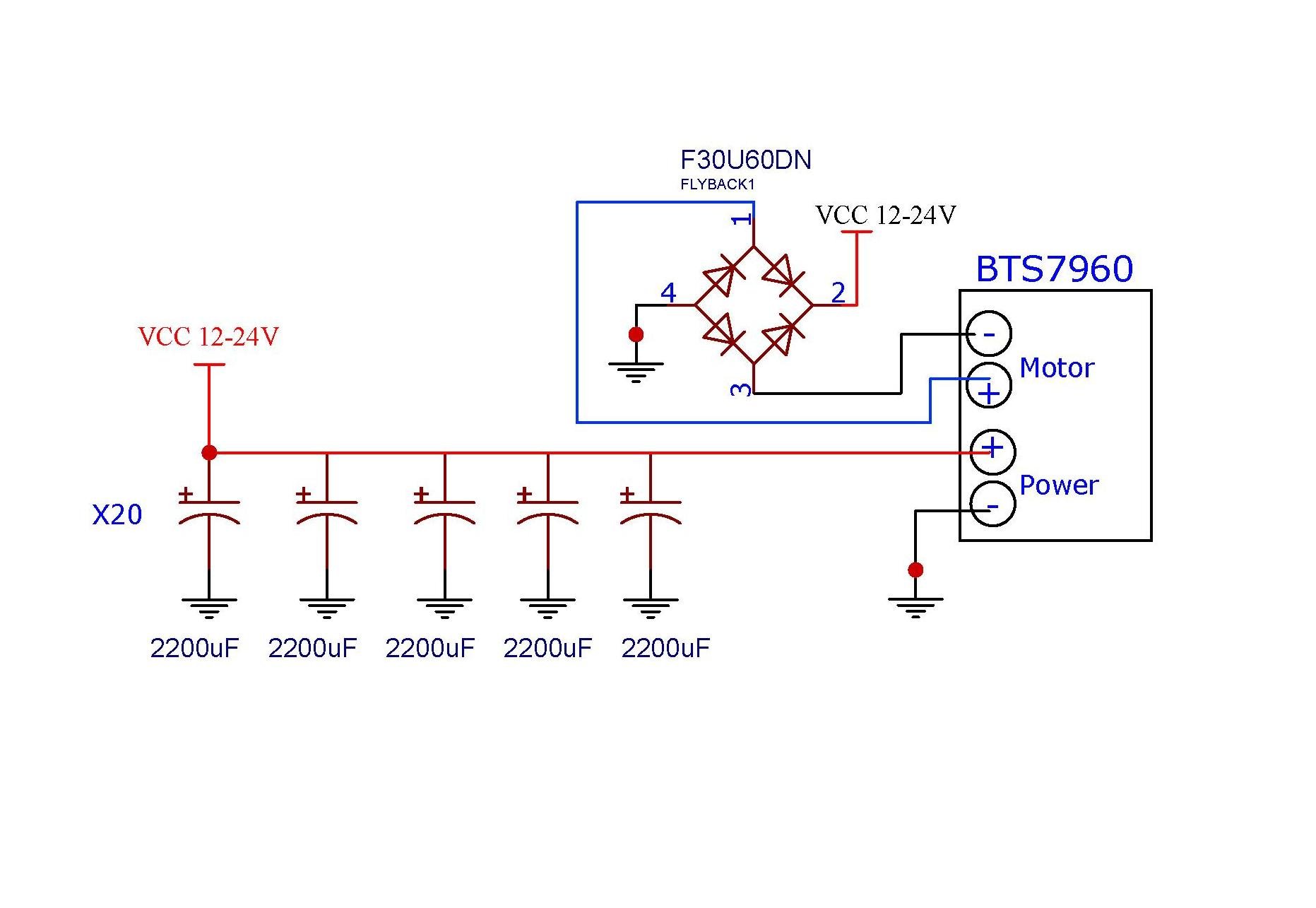
Схема подключения БТС.
-
Любезно предоставлю схему, выше сказанного. ) Диоды главное - ultrafast recovery diode. Так же набираются в параллель.
-
Не почти, а отдельным. ) Нормальные игры поддерживают кучу отдельных контроллеров. Есть такие что нет, которые слеганца древние. Поэтому это единственный минус, такого решения. Скачай ещё dxtweak2. Можно без настроек, диапазона осей и без этого, но удобно. В EMC, тоже это удобно продуманно. Под осью будет SET MIN/SET MAX диапазона. Всем, ещё настоятельно рекомендую, добавить в схему подключения параллельно по питанию конденсаторы, руководствуясь значением "ripple current". На примере кондёров фирмы Samwha, серия RD. samwha_rd.pdf Или Panasonic electrolytic capacitors datasheet Panasonic FC-A Caps.pdf т.е. в зависимости от вольтажа конденсатора, 50/60v и номинала ёмкости, набрать параллельно соединённый банкой, в общей сумме по RP значению, чем больше в итоге, тем лучше) Т.е. Panasonic 270uF - 1200ma - x20шт конденсаторов = 24 Ампера. итд. Значения могут быть и больше. И Flyback диоды бы тоже хорошо. И не просто хорошо, а очень бы хорошо) И плюс активное охлаждение BTS )
-
https://www.youtube.com/channel/UCe6N3hxeEd2DB_undoxaIMQ https://www.youtube.com/channel/UCrMH3yP67hjNvRbSHURawOA EMC09 https://drive.google.com/file/d/1F6UhFhHaGYqgZzgr4B8vnaVw6vmGyaZ3/view?usp=sharing stank, Проверь надёжность соединения проводов.
-
stank, некоторые ставят педали отдельно на ардуине с emc прошивкой.
-
BTS7960
-
Выпилив непосредтвенно реле из драйвера, и заменяя его мостовой схемой на транзюках, возник вполне резонный вопрос, почему собственно бы не дать шанс одному БТС7960, вместе в команде с диодами холостого хода, и конденсаторами. ) Фото драйвера с реле. В качестве небольшого резюме, опыта по использованию релешки. Вот честно говоря, не знаю, какую оценку дать , потому что заменив на БТС, и выкрутив FFB на 100% Gain, Constant и фичу в виде Scale до x2.5 раз Constant в EMC09, получилось почти, такие же коллебания руля в ценре, как и с реле, но на гораздо низких значениях FFB, когда была релюха. Для BTS оставил всё в сотке и снизил Scale x1.5 Constant. Если x2.5, чипы слеганца сильнее нагреваются, поэтому выставленно пока в более "осторожных" режимах, всё это дело. (Scale x1.5 Constant.) Опять же повторюсь, что с "реле драйвером" качало гораздо сильнее на гораздо более низких значениях силы. Момента переключения, по смене направления вращения, тоже не заметны, с релешкой, как может показаться. Тоже самое в центре. Но короче, если бы не "осциляции" по центру, как следсвие вынужденное уменьшение силы ffb, для её устранения, получился абсолютно адекватный и мощный играбельный драйвер. Если это конечно вообще его проблема, т.е. смотри абзац выше. Можно конечно соеденить его с мостовой схемой, из начала экспериментов, мда и посмотреть что получится. ) Может быть пойдёт даже первый вариант diy драйвера, но уже c правильной обвязкой по части диодов, и кондёров. Даже может быть получится забить на необходимость deadtime-ов для моста. БТС7960. Как было озвученно ранее, номера чипов в этом бтс, вроде как из правильной серии. (617) Линейность базы с рулём 1.4 кг. Вот эта криптоватось кривой, кажется ещё благодаря тому, что используется не MMOS а EMC. Arduino не STM32. Предположительно. Так как, в сравнительном тесте было достаточно одного запуска, и получается ровная кривая линейности , в MMOS, c EMC видимо есть свои небольшие мультики, на этот счёт. Но напомню, что она была ровной, при экспериментах с diy драйвером первой версии и c EMC09) Так же всё в сотке для теста. Для релешного драйвера, значени были подскручены) BTS7960. Видос контрруления, сейвов, итд. особенно в предпоследних поворотах. Заезд на релюхе)
-
На стм писать код куда "интересней".... Этого можно было бы и не делать... )
-
Вот. 4khz.) https://www.drivingitalia.net/index.php?/forums/topic/76596-volante-direct-drive-con-arduino-stm32/page/154/#comments
-
Забудь про эти гармоники ШИМ, если о них вообще есть смысл говорить, и если они вообще там присутствуют. ) Нету там никаких писков.) Dd в тесте, 8khz скорей всего. На 20+ khz с бтс, движок может пискнуть, еле слышно кратковременно и редко, при некоторых режимах работы, и когда нагреется. Но это не о чём совершенно. На 4khz diy наоборот, при повороте на большой градус руля например, звук пропадает. Это если интересно. Гораздо больше интересен вопрос необходимости гальванической развязки контроллера и драйвера, по части, сигнальных проводов. Потому что, у них общие земли, и наблюдались раскрутки руля не в тему, с бтс, при вылетах с трека в игре итд. Тоже самое было с diy h-мостом, без оптопар. Ардуину наверно это выносило слегка. С опто развязкой, таких мультиков нет, в diy pwm+dir драйвере, даже при том что там тупо реле. ) Как бы это представляется верным объяснением. Разница кажется как раз и может быть только в по. Что тоже спорно между прогами. То что стм быстрее пердуины, тут особой роли, кажись, не играет. Есть ролик, кстати, популярно объясняли что ардуина, "задушенна," и могла бы гораздо быстрее даже стм по скорости своего процессора)
-
Syava, ты на частотах выше 16khz pwm, уже не будешь слышать этот звук. На diy драйвере тоже, никаких гармоник "не слышно" ) Далась тебе эта тема... Мотор, он "по совместительству" , как динамик. Народ делает diy pwm контроллеры для машин, ссылку я уже приводил пример, и используют частоты 20khz, без каких либо фильтров. И вряд ли там будет писк. ) А нормальные драйвера могут работать и на 2-3Mhz и выше.
-
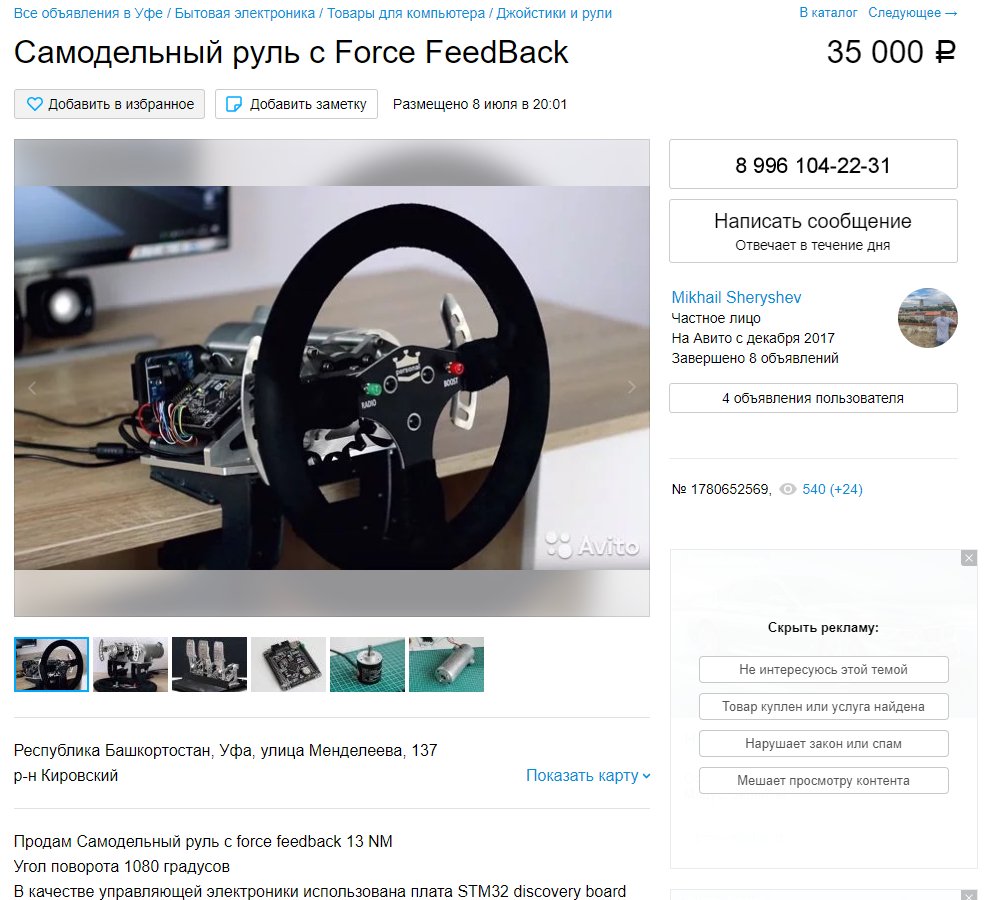
Как то один чувак иностранец, выдал мою работу за свою, по 3d. Это было эпично, когда его раскусили и я нашёл его тему отписавшись в ней) Ну а Авито он такой, Авито.) Он уже месяц это продаёт
-
Запиши)
-
Хм. В EMC там ppr вписывается как 1600, с 400ppr энкодером. Для MMOS, надо было внести CPR как 400. Если 1600, то там бред получался, энкодер приходилось крутить фигову тучу раз.
-
Это вряд-ли. ) Но очень интересно конечно будет глянуть на результат с высшими передаточными под этот мотор. Он может быть совсем медленным тогда. А блок питания какой?
-
Piradik 5, Та про драйвер который я сам запилил. Жди бтс, не парься) А где увидел?
-
19nm не 19nm, но тебе хватит с таким мотором) Ну а по оборотам всё равно будет просадка. Как бы там не было) Опять же, было на первой стр. темы.
-
Тады жди другой бтс. Могу конечно посоветовать diy драйвер. Но ты ж не будешь его собирать. Плюс, надо бы убрать от туда реле, и обычный мост поставить. На сильных настройках ffb, по центру скорости переключения реле слеганца не достаточно, что бы не было осцилляций в центре. А так всё гуд.
-
Syava, на валу руля, должно быть 200 об\мин. как минимум. Этим можешь и ориентироваться. Смотри на пример каравана, по факту его оборотов, уже были расчеты, и они совпали и без опубликования тестов до этого.) Есть расчёты и по другим движкам. Зайди в мою тему, если не был. Там полно данных с тестов. Включая и g25, и серво DD. И тут они были тоже. Насчёт не меньше 10нм, ты не совсем прав. Fanatec если не ошибаюсь, 5-6 nm. Ессесно ДД никто сюда не сравнивает. Уже достаточно есть, разных сборок, на разных моторах, уже можно было бы и вникнуть, проанализировать)
-
Как она называется? . .p.s. всё сорян, подобрал. CR1220.)




.png.d524fb1a57c0c52328d01ba18b673463.png)