Sieben
-
Постов
1159 -
Зарегистрирован
-
Посещение
-
Победитель дней
26
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Sieben
-
 Вообще-то без буковки z, всё прекрасно работает и не сбивается, с центром всё в порядке))) Караван кстати об этом тоже говорил)
Вообще-то без буковки z, всё прекрасно работает и не сбивается, с центром всё в порядке))) Караван кстати об этом тоже говорил) -
Кому нужна калибровка и в чем её необходимость? )
-
по отличаям то в курсах, просто тогда странно что не запускается, если работало с wheelconfig. Подключи не через breadboard, совет всё равно.
-
@Rezinoviy_Ded напрасно пользуешься таким breadboard-ом для соединений. Есть ли подтягивающие резисторы? 50-500Ohm. Какое такое отличие в соединение энкодера по схеме wiring vs Wheelconfig, из-за которого оно по-твоему не работает?
-
@piradik5 ну от разных моторов, в их номиналах питания, естественно зависит тоже походу. Не сказал, что на сотне FFB и Spring Нормальная работа без вылетов. А так было, что только в десктопе спринг руль выкручиваешь, и она вырубалась быстро. Поднагревается бтска конечно. На 12шкее она вообще холодная. Ну а так на 16 khz 12v+ на одной БТС не вытащить MY моторы. На сотке в MMOS не прогонял в игрухе. Решил глянуть, на настройке полностью линейного руля, как оно. Нормальненько так кстати) Ещё глянуть сколько Nm-ов там. Думаю в районе 3х будет. Вот, так что есть альтернатива с замуткой по частоте. Уж если надо, так надо кому-то вдруг)
-
Значит, касательно информации по уходу в защиту одного БТС на вольтаже выше 12V, с моторами MY серий. Снизил частоту PWM до 2.8Khz. Max Force 40%. Выбрал самую низкую в MMOS. Два последовательно соединённых блоков по 12 V. БТС нагревается сильнее, вернее нагрев становится заметным vs 12v. Но фокус со снижением Max Force даже ниже 20%, до этого на 16Khz и 24в не прокатывал, бтс выключало всё равно)
-
@Basma4 Это хорошо. Вернее не очень, т.к. тогда бы было проще...
-
да это тогда интересно. С пастой там понятное дело для охлаждения, но если слой тонкий, что вполне возможно, может остаться короткое замыкание между ними всё равно. Тестером глянь площадки чипов с уже прикрученным радиатором, сейчас. Они не должны прозваниваться омметром между собой. Ну что бы этот вариант причины уже совсем выкинуть. Из-за этого совсем исправные бтс тоже не работают, пока это не сделать. Если кому надо, о чём речь, то это в кружках красных. Вот между ними контакта быть не должно. Точно так же как радиатор не должен перемыкать и другие, со стороны где он прикручивается, которые он в силу особенностей конструкции этих чипов легко может сделать)
-
Ну так попробуй, в чём дело?) Скутерные вырубают в защиту бтс например, если выше 12v питание с одним. Только всё сначала соедини хорошо. потом включай блок. Если поможет.
-
А сам бтс у тебя есть?
-
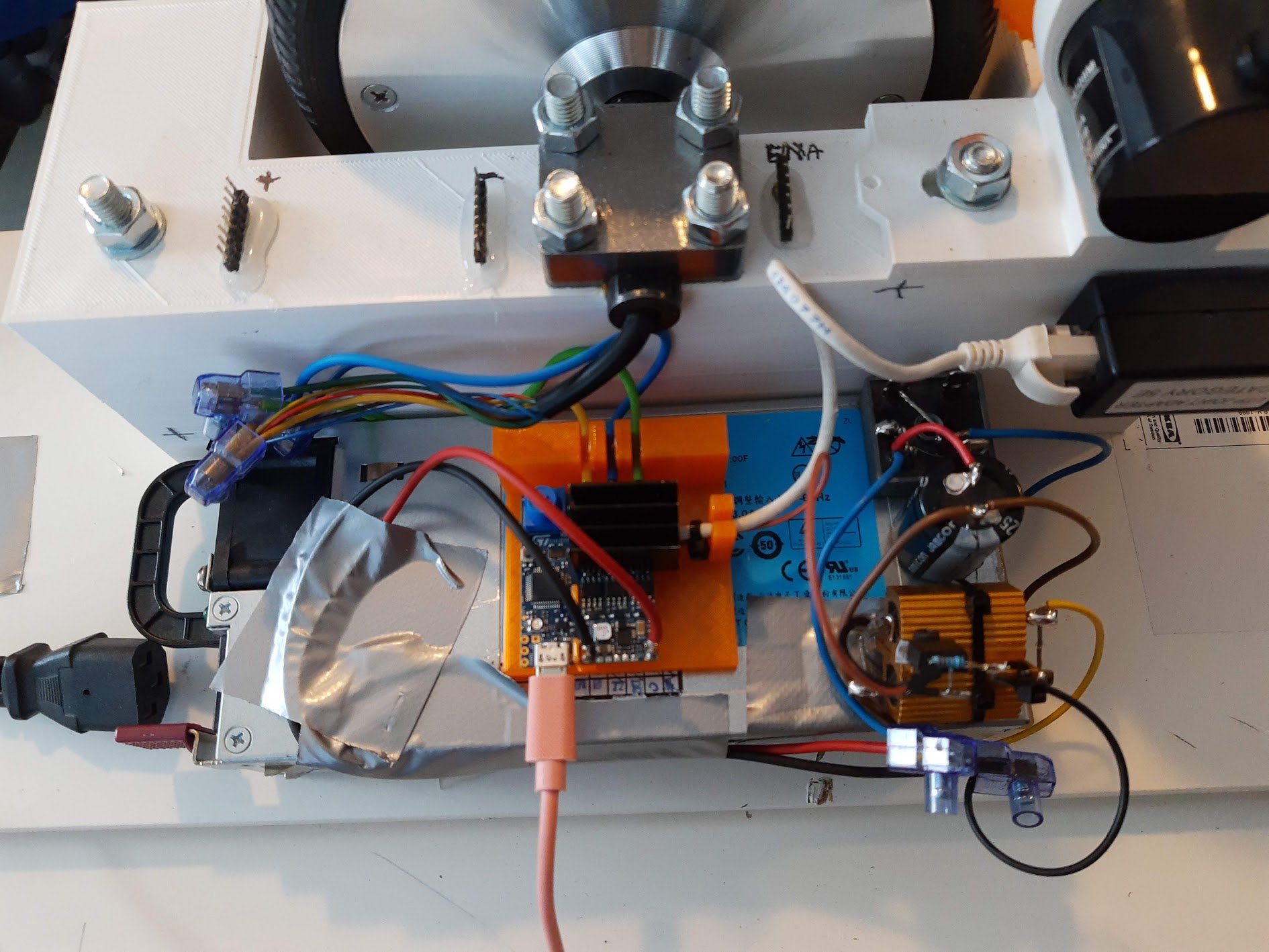
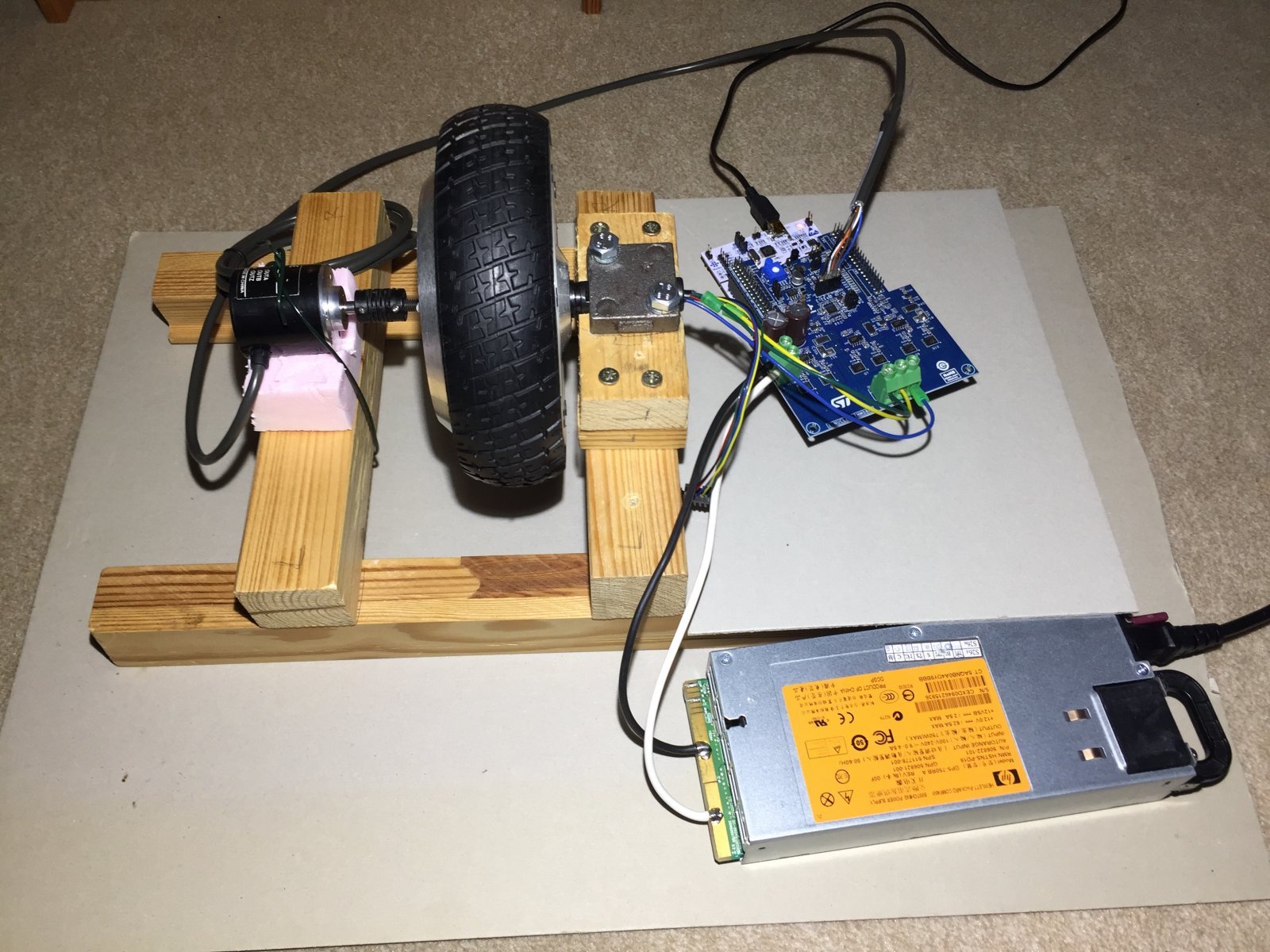
Судя по фото например не подключённый мотор с бп к драйверу)) Открутить радиатор от драйвера. Там может быть кз между чипами через него. Нужно их либо через термопасту или силиконовые прокладки. Первое лучше. А так много чё может быть если честно. Включая не верное подключение итд итп. Предполагая что STM32 и MMOS уже настроен.
-
Собрать чпу? Тут кажется не читают на русском, нет? Похоже нет. Ну что-ж, ещё и лучше) https://www.xsimulator.net/community/threads/son-of-opensimwheel-an-experiment.7422/page-2 It's not possible using stepper controllers "off the shelf". I had made modifications to the internal controller hardware and developed specific software to drive the motor. The testing so far has indicated that modifying existing controllers does not produce the best results so I have opted to design my own stepper controller specifically for the task. Его сайт по продажам измененных личности им, подобных контроллеров, который заглох. https://sites.google.com/site/steppersimwheel/ Его оценка проекта: https://sites.google.com/site/steppersimwheel/build-guide/test-results Алишка, ебеюшка, завалены такими моторами и драйверами. Много видел рулей на них при таком раскладе)))
-
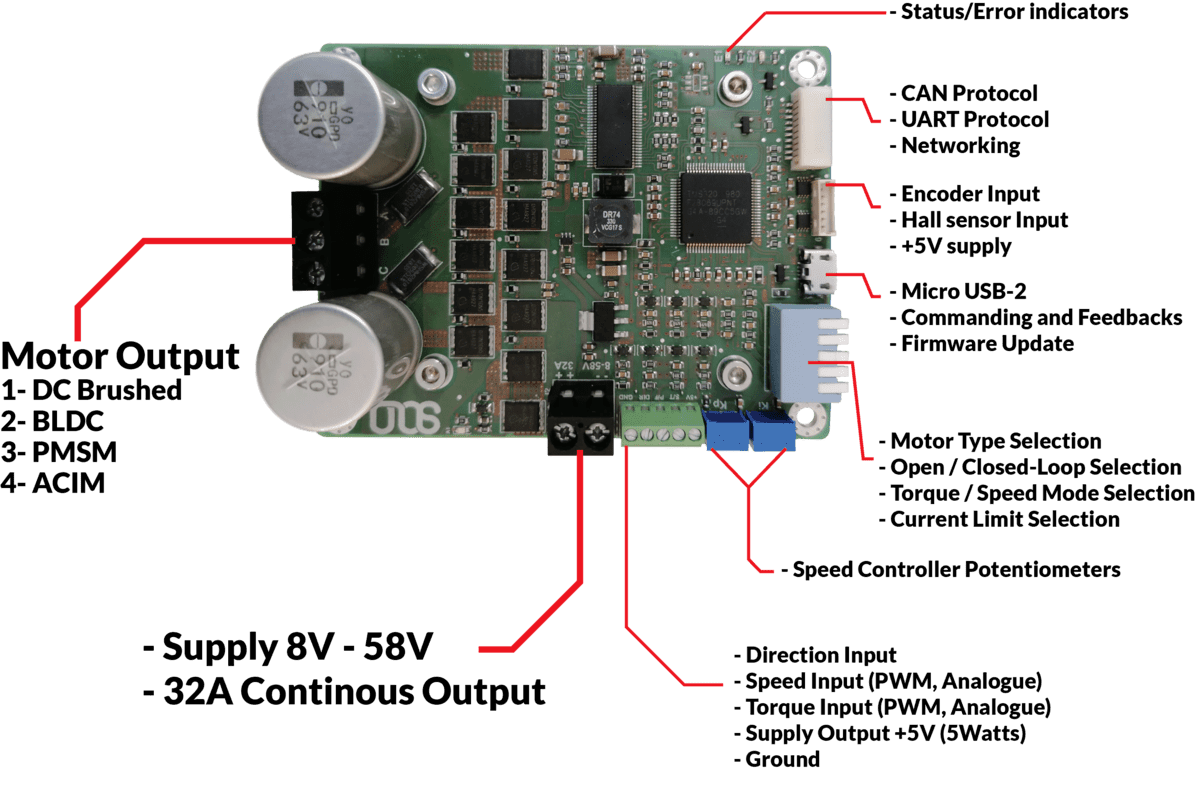
По картинкам нормально ищется. https://www.trinamic.com/support/eval-kits/details/tmc4671-bob/ чипhttps://www.trinamic.com/products/integrated-circuits/details/tmc4671-es/
-
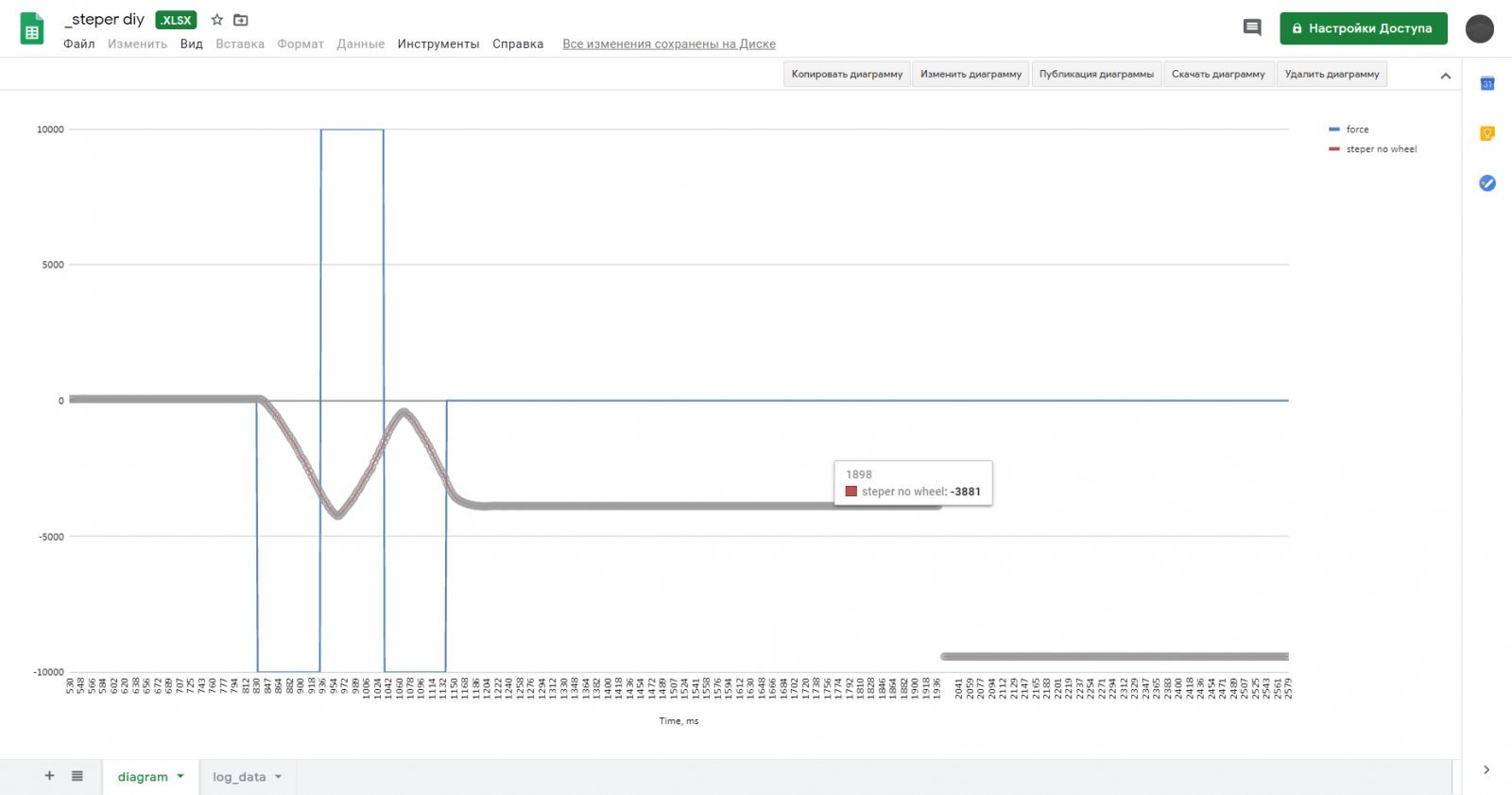
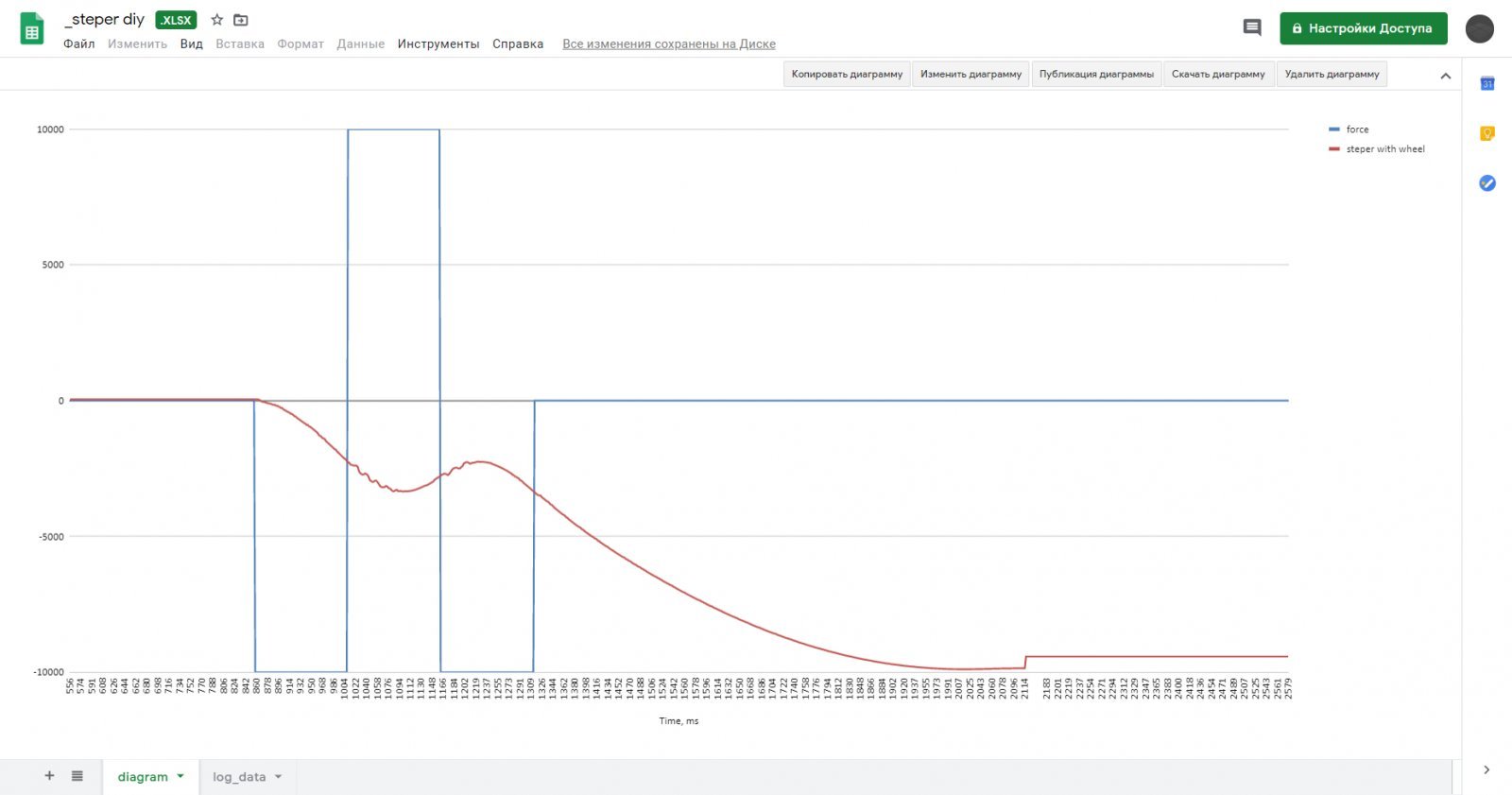
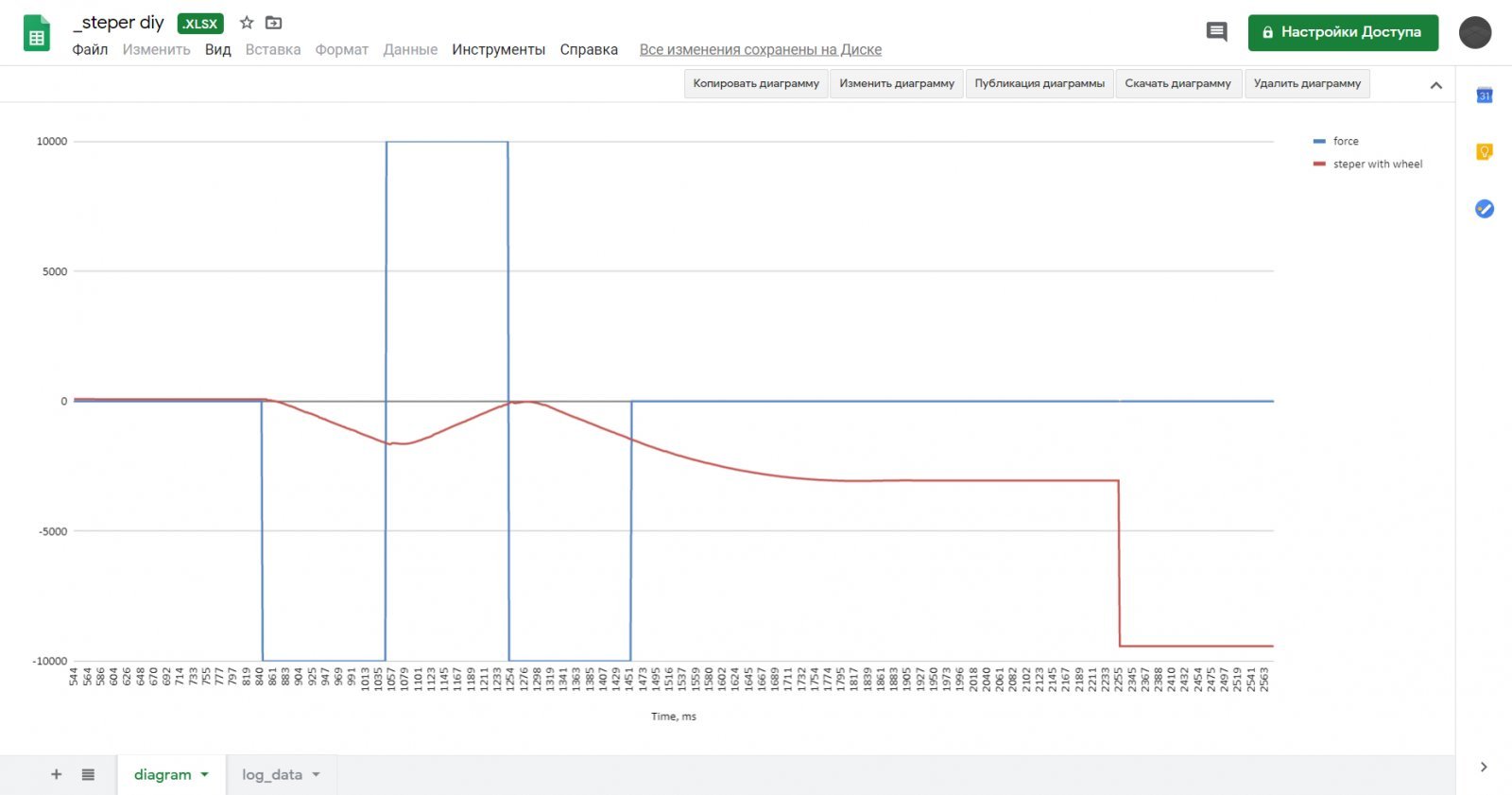
Нет, там будет другая картина, тем более с рулём. Будет наоборот, что бы хватало оборотов и момента потом) Если у тебя Ардуино, не забудь что в полную силу база будет работать после того как добавишь "Constant". Либо снизь Main gain, убери Constant, либо переделай передаточное, для более медленной работы. Главное мотор не спалить всем этим. Можно спросить у них самих, но почти с полной уверенностью можно сказать, что работать будет. Такой тип моторов там тоже указан. Другой платы там не нужно, он понимает обычный способ PWM/DIR для всех поддерживаемых им моторов. B-G431B-ESC1 для BLDC, не для степперов. Я там ссылку перепутал на его тему, исправил в сообщении. Список компонентов там перечислен. ) https://www.xsimulator.net/community/threads/openffboard-controller-for-custom-direct-drive-wheels.14405/#post-193971 Попросил его сделать степ тесты. Но он говорит, ещё настраивает, и блок по напряжению не тот что нужен. Так что это его не финальные результаты. Ну короче надо раскуривать эту тему больше) Без руля и в этом 100ms импульсы. С рулём.

-
@BogKam41 почему не уверен? Так и есть. Есть другие примеры. BLDC https://www.xsimulator.net/community/threads/dd-wheel-with-hoverboard-motor.13178/ - NUCLEO-F303RE (CortexM4) 10€ - X-NUCLEO-IHM08M1 inverter (10-48V and 30A max.) 40€ Другой тип переделывал контроллеры, и перевёл их на платную основу по теме BLDC. Но кажется уже прикрыл лавочку. Из той же темы. B-G431B-ESC1 https://www.xsimulator.net/community/threads/dd-wheel-with-hoverboard-motor.13178/page-15#post-192197 Если по степперам. https://hackaday.io/project/163904-open-ffboard https://www.xsimulator.net/community/threads/openffboard-controller-for-custom-direct-drive-wheels.14405/#post-193971 Но это уже выходит за рамки обсуждаемых проектов на моторах постоянного тока, но как бы если для инфы, то не без того, куда копать, куда смотреть в этих направлениях)
-
@FredJesk та можно то и не теоретически, но это совершенно другое железо для управления нужно, если это мотор переменного тока. И мягко скажем, это совершенно другая история. ) И потом уже смотреть, подходит он, или нет) И кстати появился новый тип контроллера. Выходит на рынок. Управляет вроде как всем и в разных режимах включая ассинхронниками. BLDC тоже, в тех режимах, как требуется в нашем приложении) https://www.solomotorcontroller.com/solo-specifications/
-
P.S. к разговору выше. Гы, скинул настройки в пкарсе в дефолт, и да походу не заметил, что я тогда кажется уже твикал их и это был не дефолт.... По времени выехал вне самый худший результат, чем с настройками. Видимо оставил без внимания, и показалось что разница была между дефолтом. Так что я пардоньте Кип апгрейдинг ё скилс )))
-
@FredJesk трёхфазный асинхронный ещё небось какой-нибудь. ))) Больше на это похоже. В обсуждаемых, возможно пока, решениях с моторами прямого тока он не подходит. Если он обычный DC, не факт что ему не потребуется, что нибудь из разряда 120-220 вольт. Это как минимум другой драйвер тоже)
-
Реально считаешь что их сравнивал? Корсовскую и пкарсов да ещё историческую и новую? имхо у пкарсов даже новые Спа они в некоторых поворотах кажется по другому сделаны. Ну мне так показалось. В плане точности. Про базу Корсы, особо что и не говорил. Тут сказали что не видели не в одной игре, такие базовые, что не может быть разницы. Я накатывал для видоса работы DIY базы руля, в исторической пкарс, и плотно тестил абсолютно разные настройки , поэтому могу спокойно сказать какая там может быть разница. Корса тоже, не идеал. Если сравнить с рфактором2, там можно легко заметить не совсем адекватные сносы передней оси в совсем не скоростных поворотах. В рфакторе2 поближе к реалу поведение, без такой галиматни) P.s. У него в корсе по базе может даже тупо баланс тормозов не тот, вот и аккуратничает, что бы не снесло. итд итп.
-
Все же знают как выглядит мотор из под наждака, чё....)
-
Это схема для wheelconfig. Для pwm emc v9 пины 9, 10 используется.... А не 10,11.
-
Если я тебе скажу что Porsche 911 в SPA Historic в Project Cars2, уберём из внимания что трэк не аккуратен от слова почти совсем от того как был в реале, или то как трэк сделан в Rfactor2, разница между базой и не базой даже далеко не 10 сек))) что даже одна настройка схождения решает, вернее её тонкая подгонка, какая у тебя будет максимальная скорость, колоссальная разница причём))) И это только один параметр) Рекомендую. И про "едешь, не едешь(c)"