Sieben
-
Постов
1159 -
Зарегистрирован
-
Посещение
-
Победитель дней
26
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Sieben
-
 Фанатек твой может вырубать бп в таких экспериментах. Он не может не стартовать при 5 ампер) Подключи бп от ноута будет тоже самое. Уход в защиту. Слайдером FFB gain. Всё что твой мотор вывозит в пределах его rated current, т.е. его номинал по току, и есть его максимум при котором он может длительно работать гарантированно, на пределе без окончательного своего перегрева, и отдаваемой мощности, при данной конфигурации передаточных чисел итд т.е. если указанно 14a, то в стопоре мотора тоже не должен не превышать максимум 14a. Тем более без охлаждения. У твоих движков это походу ....1,25 A) Проверить можно косвенно, по температуре. В приделах 60C корпуса может быть нормой. Обмотки будут выше, но на пределе. Не выше этого забираться. И амперметр в цепь. Стопорить мотор в максимуме, и регулировать слайдер gain пока не будет достигнуть дзень rated current. ) Вольтажность тоже влияет. Можешь подскинуть до 12 вольт как доп. Помимо этого дешманский, но действующий способ это ограничить самим нормальным БП на нужный ток. Мотор сгорит гораздо быстрее чем БП с которого он будет тянуть всё с просадкой по вольтажу. Проверенно в ходе длительного эксперимента) Ни чё с бп не будет. Ну или резистор в цепь, лампочка от фар итд)) Так что как понимаешь, слайдер FFB, полезная вещь)
Фанатек твой может вырубать бп в таких экспериментах. Он не может не стартовать при 5 ампер) Подключи бп от ноута будет тоже самое. Уход в защиту. Слайдером FFB gain. Всё что твой мотор вывозит в пределах его rated current, т.е. его номинал по току, и есть его максимум при котором он может длительно работать гарантированно, на пределе без окончательного своего перегрева, и отдаваемой мощности, при данной конфигурации передаточных чисел итд т.е. если указанно 14a, то в стопоре мотора тоже не должен не превышать максимум 14a. Тем более без охлаждения. У твоих движков это походу ....1,25 A) Проверить можно косвенно, по температуре. В приделах 60C корпуса может быть нормой. Обмотки будут выше, но на пределе. Не выше этого забираться. И амперметр в цепь. Стопорить мотор в максимуме, и регулировать слайдер gain пока не будет достигнуть дзень rated current. ) Вольтажность тоже влияет. Можешь подскинуть до 12 вольт как доп. Помимо этого дешманский, но действующий способ это ограничить самим нормальным БП на нужный ток. Мотор сгорит гораздо быстрее чем БП с которого он будет тянуть всё с просадкой по вольтажу. Проверенно в ходе длительного эксперимента) Ни чё с бп не будет. Ну или резистор в цепь, лампочка от фар итд)) Так что как понимаешь, слайдер FFB, полезная вещь)
-
Там слеганца, не так всё просто. Для bldс нужен torque mode контролер. т.е. управление не скорость мотора, а его моментом, током. Что называется, нельзя просто взять и поставить любой bldc контроллер, нужно смотреть. ) Изучайте: https://www.xsimulator.net/community/threads/dd-wheel-with-hoverboard-motor.13178/
-
Alt+Tab, или оконный режим) Понятно. Интересная тема конечно. _________ PID controll для ffb тоже интересная тема наверно. С первого видео исходники есть.
-
@0niki0 Интерфейс будет? Или всё через дисплей на базе и кнопки?
-
Ты главное смотри что бы она не была как всё те что уже есть на Ардуино, что под них народ систему меняет, чтобы была обратная связь во всех играх, не только четко в одном Iracing, без бубнов) MMOS в этом плане стабильный. Слышал про такое?)
-
Та тут сто пудов прошивка.
-
А вот кстати и другое мнение. На https://electronics.stackexchange.com/questions/485853/why-ibt-2-motor-driver-is-more-powerfull-with-arduino-then-with-stm32?noredirect=1#comment1235570_485853 Дело в проге говорят. Её коде..... )))) Тоже говорят что пофиг какой там уровень pwm. 3 или пять вольт.
-
vgs on, и её зависимость пропускной по току, от напряжения....как бы намекает..... @0niki0 ты прав) пардон)
-
Кстати, дело может быть в питании самого BTS. Как такой вариант? ) @0niki0 Если под рукой сейчас есть BTS, можно подать от отдельного бп, на пины питания драйвера 5V , и посмотреть его поведение. Минусы с контроллером связать. Это может играть роль. Ему всё таки нужно 5 вольт. Вон датчик дпдз от стм вообще не заводится, хотя там всего 4.3 с стм идёт а не 5v. Я запитывал отдельно от комповского бп БТС по линии 5v, но на эту ерунду не проверял, там тогда другую нужно было фигню проверить, поэтому. ) Ну так, предположительно) Ну и плюс, с ардуино может быть идёт больше тока в логике. Как известно, не последний параметр в раскачке мосфетов тоже. До кучи.
-
У тебя напруга на выходе с драйвера меняется только из за разницы логики, не забыл? Когда измеришь, ты об этом тоже обязательно расскажешь) Не будем повторяться. ) А напряжение будет проседать только из-за Бп которого будет не хватать для мотора под нагрузкой. И только. ) Распиновка на драйвер вместо 5 вольт на R-EN L_EN такая же как и в новых EMC. Подрубается только когда надо, без тормоза мотора. Хотя это по секрету с нормальным мотором в плане "лёгкий руль" когда надо, присутствует и всё в порядке) В прямом. "Constant" на прямую влияет и на общий GAIN колоссально. И в этом легко убедиться..... зачем я буду рассказывать. У меня вот есть такое предположение что Constant, эдакий вкл Torque mode, для DC моторов))) EMC полюбому тянет в мотор гораздо больше ампер когда она задействована. Не трудно понять по теме думаю)
-
Если нет pro версии Emc, поставь старую, которая 09.либо wheelconfig. И убери constant force в ноль. И сравни их силу с mmos. ))) В лайт версии EMC Gain, constant и spring, в сотке. И ещё раз. Правильный ШИМ, это вкл выкл и ТОЛЬКО длительностью сигнала регулируется мосфет. Другие подробности, как частота ШИМ итд опустим. И будет время, прочти полностью про руль на Леонардо. Начало постройки драйвера включительно.
-
@0niki0 можешь не проверять потому что, уже смотрел выход напряжения с выхода драйвера с MMOS. 12 вольт, на 12 вольтовом БП) БТС) 24 на 24. Иначе с чего бы я говорил что мотор работает лучше на 24, и снижать нужно Ффб но на локе, один бтс его не вывозит в локе) Лучше зайди сюда, и посмотри схему, как организована проводка выхода шим на оптопару. Подчеркну что gnd контроллера совершенно не связанна, и не должна быть связанна, не с драйвером затвора, не с gnd питания мотора. И каким там по твоему образом должно меняться напряжение на драйвере затвора мосфета, как ты говоришь плавно от 0 до 15вольт, при таком раскладе))) Если земли связать, то будет уже не шим, а линейка, а из мосфета переменные резистор которому трындец в таком режиме. Если уже это не понятно то пардон.
-
Если у тебя так работает шим, то как должен, а не в линейный загонять мосфет, то пускай может кто нибудь ещё "дозвониться" ? Не против? )
-
@0niki0 Не заставляй искать смайлик фейспалм) Ладно?) Ты не прав абсолютно. Подучи матчасть. Вернее пойми её)
-
Видимо не совсем. Вот и ошибаешься. Напряжение меняется плавно от длительности импульса в линейке, 0-5в затвор не открыт и не закрыт, он плавает в промежутке, тем самым нагреваясь, и сгорает. В ШИМ то как оно должно быть один уровень напряжения всегда либо 0 либо 5v, без какого либо промежутка в напруге. Чисто вкл, выкл. Вот и вся разница).
-
Потому что классика того как работает PWM, не в линейном режиме. Т.е. на одном уровне значения напряжения.)
-
Я же сказал утрированно. БТС работают на полную и от 3.3v. если бы он не открывался на полную, он бы сгорели... ) Я подавал через драйвер затворов 3-12 v в diy драйвере, картина была одинаковая абсолютно для logic level mosfet.
-
Что то мне кажется, тут загон что такая разница из-за вольтажности логики как следствие разная сила FFB EMC vs MMOS. Если мосфет открывается на полную на 1 вольте, то он открываться на полную на 1 вольте. Утрированно. Это имело бы смысл если бы они работали, не долго при этом,) в линейном режиме, представляя из себя тогда просто переменное сопротивление, открываясь закрываясь частично напряжением 0-5v, рассеивая остальную мощность внутри себя. А нормальный и правильный ШИМ, подразумевает один уровень напряжения, но с разной длительностью фронтов, т.е. длительностью импульсов. Поэтому тут слеганца не сходится, что разница напряжения, должна давать такой эффект. И БТС так не работает, иначе бы им бы хана приснилось от STM. Они не работают в линейных режимах. Это удел самодельных усилителей для КВ на дешманском IRF510, который открывают до опредённого порога на гейте и всё. т.е. работают в несвойственно им режиме в любом случаи.
-
Я тоже думаю что дело в этом что MMOS проигрывает EMC. Особенно если Constant выкрутить на максимум. Можно, как там этот переходник называется с 3,3v на 5v поставить. Хотя в BTS указана и та и та логика. Поэтому это может быть не точно.
-
Поставь DXTweak и наглядно настрой диапазон. Отличная прога. Да, логично. Но треша с датчиком давления не на СТМ, не на Арде, чёт не наблюдалось тоже) Вокруг. )
-
В данном случаи, логика не причём. Логика это выход pwm/(dir). Т.е. выход сигнала который идёт в драйвер мотора. А к входу сигналов с датчиков, логика отношения не имеет. Это совершенно разные вещи. Дело в питании датчиков которые с СТМ идёт не ровно по пять вольт, а около 4.3V) И тем кому нужно не менее пяти, на STM могут не пойти)
-
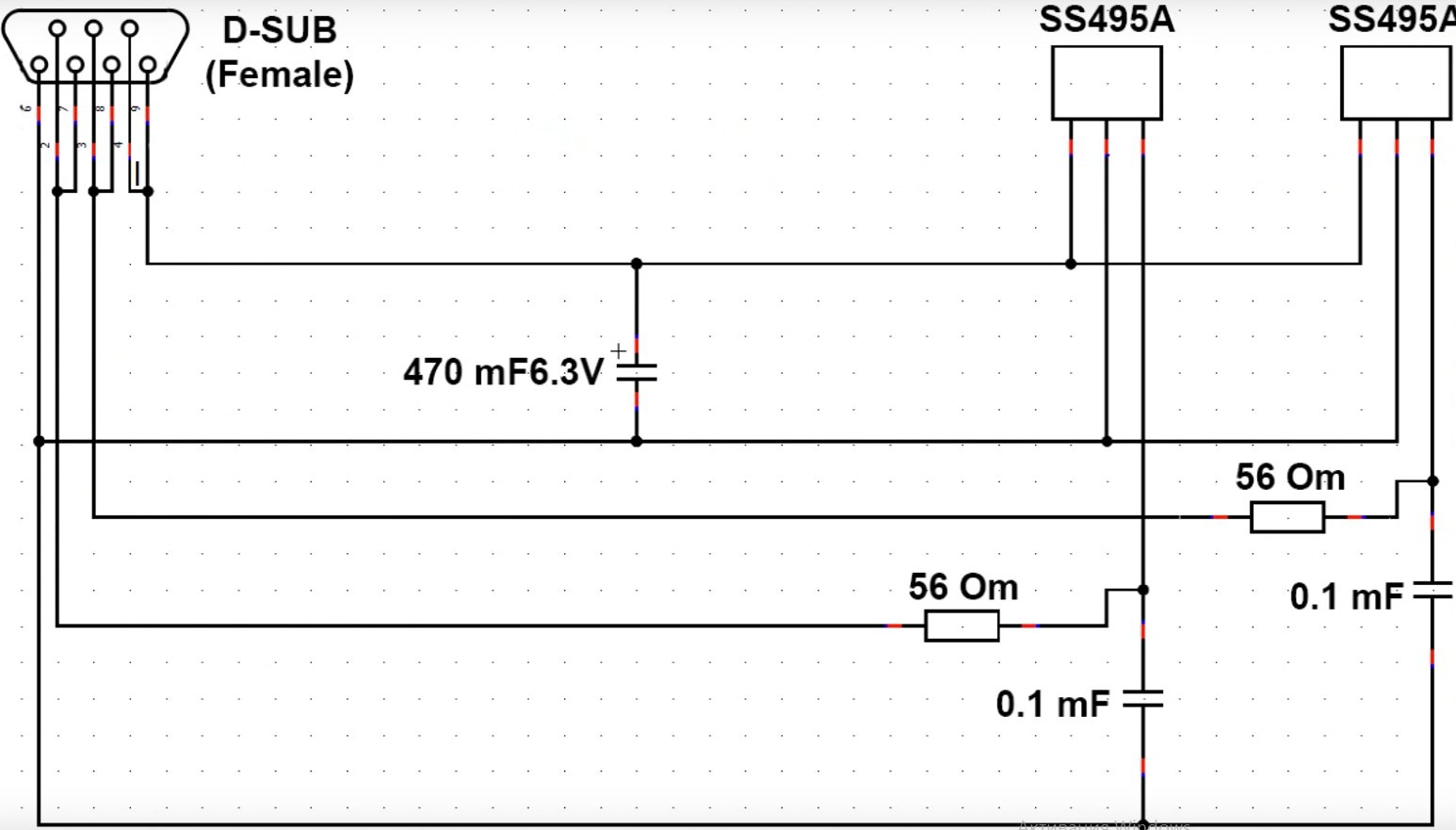
@ksg79 Он у тебя так не будет нормально работать. По другому нужно ставить. Слишком далеко итд. И вот с таким расположением двух магнитов, работают гораздо лучше и по полному диапазону.
-
Low pass фильтр получше может проблему решить. Хорошо работает для холлов. Вполне пойдет и для потов. Не экрана не феррита не надо будет).
-
Не знаю) я их в стм не подключал.