Sieben
-
Постов
1159 -
Зарегистрирован
-
Посещение
-
Победитель дней
26
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Sieben
-
 Параллелить это называется наверно. Подозреваю вряд-ли. Зайди на тот форум спроси) Я не знаю, но можно дать и меньше питания, хватит и так, если это с ними сработает.
Параллелить это называется наверно. Подозреваю вряд-ли. Зайди на тот форум спроси) Я не знаю, но можно дать и меньше питания, хватит и так, если это с ними сработает. -
Мотор bldc 250w. Пол метра рычаг 2.5 кг т.е. в метре будет 1.25 кг = 12 NM. 1000w dd с DC MY 1020 показывает только 6NM)))
-
Это рабочии схемы уже. В смысле? Много?
-
https://www.xsimulator.net/community/threads/designing-an-arduino-leonardo-force-feedback-wheel.14705/#post-198229 Человек оказывается получает 147 Nm на RS моторчике если вдруг он удержит полторашку на одном метре) ещё доказывает с кривыми формулами с припиской, что эффект рычага не действует на измерения. Во блин как. А начиналось скромнее с 14Nm с 1:15 передачей, и 4.5Nm в 35% процентах силы. @NITOR Запас то не спалит, но просто фокус с меньшим амперажом не позволяет мотору хавать не в себя если не снижать FFB. Своего рода "защита от дурака" вот таким вот образом. Так как я видел полно отзывов, что моторы тупо попалили. Сам БП тоже не особо то папалится, если его используют всего. P.S. народ подгоняет схемы и решения для BLDC. https://www.xsimulator.net/community/threads/dd-wheel-with-hoverboard-motor.13178/page-18#post-198121
-
Не, ну вот это надо было сделать) А то: А руль обычный)
-
Буквально упустил 49ую стр. Та и раньше об этом говорилось.
-
Та пофиг. https://www.chipdip.ru/catalog/popular/gnezdo-na-platu Будь готов к тому что к 24 вольтам будет нужно 2 бтс. Либо снижай на 2.4Khz PWM, с одним БТС, ну и наушники не забудь)
-
Развивают. https://www.xsimulator.net/community/threads/dd-wheel-with-hoverboard-motor.13178/page-17 The current working options are: - B-G431B-ESC1 (этот вроде будет лучше) - NUCLEO-F303RE + IHM08M1
-
Если подпаяться, то уже лучше через это. Бывают разных видов. Те провода тоже могут быть нормальными, они не все разболтанные бывают.
-
@BogKam41 2.4 nm номинала. Слеганца маловато. Лучше будет так. Номинал 10 пик 25nm. Ну и по ним в зависимости от модели серии, разные показатели момента. См. Таблицу. https://www.xsimulator.net/community/threads/450-mige-direct-drive-wheel-using-mmos-and-aasd.14657/ https://tr.aliexpress.com/item/32868662195.html?spm=a2g0s.9042311.0.0.67274c4d5qpWWV https://opensimhardware.wordpress.com/building-osw-using-sumicube-and-mige-130st-m10010/
-
@925dimas По поцикам можно попробовать собрать фильтр, тут уже была тоже инфа, но для датчиков холла. Но лучше поставить другие переменные резисторы, или вообще их не использовать. Ещё работает вариант, особенно с теми что обычно в ходу, прижать, что-бы был перекос оси потециометра. Он тогда хорошо контачит ползунком по контакту. Или разобрать) и отогнуть в сторону сам ползунок для лучшего контакта. Но это совсем треш. Фильтр.
-
Если судить по схеме то, красный плюс, белый минус питания датчика, зелёный сигнал минус, черный сигнал плюс. Это если причину искать только в проводах. http://www.sah.rs/Senzori/CZL601_eng.html Это ваша мостовая схема. Ну и не знаю, можно было уже упороть усилитель или нет, но...)
-
Твоя баз сколько выдаёт? И сколько используешь?
-
Logitech DFGT: less than 2.5 Nm Logitech G25: 2.5 Nm Logitech G27: 2.3 Nm Logitech G29: 2.1 Nm - not a retail release version of wheel Logitech G920 2.2 Nm Fanatech GT3 v2: 2.6 Nm Thrustmaster Tx: 3.9 Nm Thrustmaster T500: 4.4 Nm Fanatec CSW v1: 4.8 Nm Fanatec CSW v2: 7.1 Nm
-
Вот это ещё понравилось. 17:15. Полная противоположность шин Ир vs реал)
-
-
@dmitrych о том что ир гавно по физике. В доп к видео выше как раз.
-
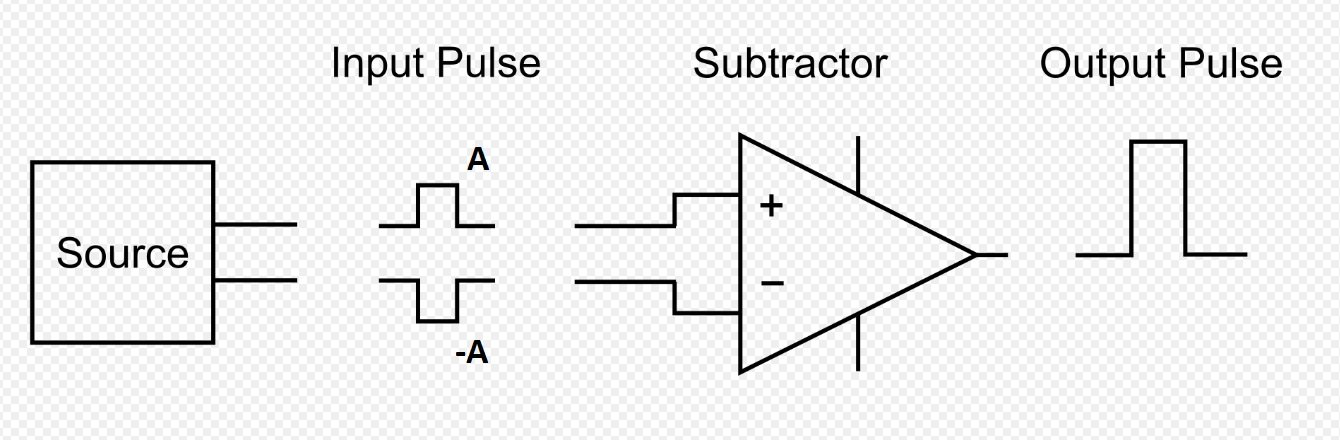
@Basma4 In most cases I have seen when interfacing differential signals to signle-ended inputs, it would be terminating the negative side to GND, and wiring the positive signal to the single-ended inputs. https://discourse.odriverobotics.com/t/differential-encoder-input/232/6 Типа попробуй законектить те что -A, -B, -Z на минус, ну а сигнальные как обычно. Либо делать через операционный усилитель. Компаратор. Ну вот как то так.
-
Ну да)
-
Я этот вопрос стёр, ну да ладно)). С ними это не срабатывает, судя по их архитектуре подключения со всем этим.
-
@Basma4 особо не вникал, но там нужен свой "приёмник" для дешифра двух сигналов, с "одного канала", обратно в один. Короче если хочешь ищи эту тему по подключению таких энкодеров к ардуинам итд. https://www.cuidevices.com/blog/comparison-of-common-encoder-output-signals differential line receiver + google https://forum.arduino.cc/index.php?topic=545199.0 Для полноты 4000 cpr, c проводами A,B,Z, без -A,-B, -Z. видимо не выход, если верить твоей картине) Ты какие подключал по цветам в STM?

-
А ещё Push-Pull. Всё пропало? )