Sieben
-
Постов
1159 -
Зарегистрирован
-
Посещение
-
Победитель дней
26
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Sieben
-
 У тебя интересные цифры энкодера выставленные. в 1000 cpr в mmos. Там выставляется значение ppr энкодера x 4 раз. т.е. если 400 ppr, туда вносится 1600 cpr. Какие значения энкодера у тебя в ppr? 250 что-ли?
У тебя интересные цифры энкодера выставленные. в 1000 cpr в mmos. Там выставляется значение ppr энкодера x 4 раз. т.е. если 400 ppr, туда вносится 1600 cpr. Какие значения энкодера у тебя в ppr? 250 что-ли? -
Та то просто был с моих настроек угла. Выставляй какой тебе нужен). И обычно в самом mmos выставляю в зависимости какой необходимо.

-
Принцип работы абсолютного энкодера Только про инкрементальный, не абсолютный. https://megasensor.com/products/princip-raboty-inkrementalnogo-enkodera/ @Basma4 как успехи?
-
Не, газ всё же должен быть острый. ) И сбрасываться быстро. Если нужны быстрые модуляции, газлифт проиграет)
-
@Beg ну так зачем тогда газлифт на газ оставил?) Надо бы убрать его от туда)
-
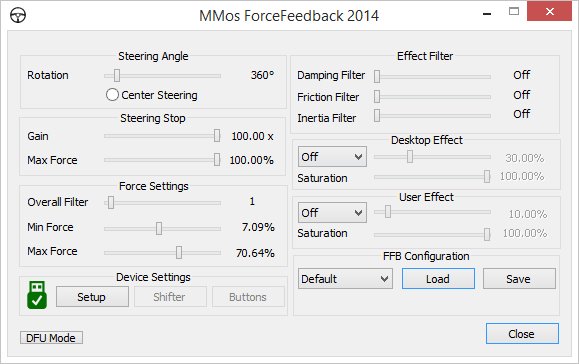
Да делается и такое. Просто выставь 16 khz, pwm. и подбирай разные значения силы в "настройках вождения", и сила минимум. Значения спокойно вплоть до максимума. Тест на линейность не схватывает с самого начала, из за этого, ну и не только. Плюс для теста линейности выруби эффекты. Что то типа этого.
-
Это как то зависит от системы, дров. У кого то все леонардо бегают по всем играм. А есть, что нужно прокручивать руль при загрузки игры, трассы. Ставят другую винду итд и тогда проходит. С MMOS у кого то тоже такое было, но не сравнимо с EMC. EMC чётко идёт с Iracing.
-
@Basma4 спасибо. Можно и в таком стиле сделать).
-
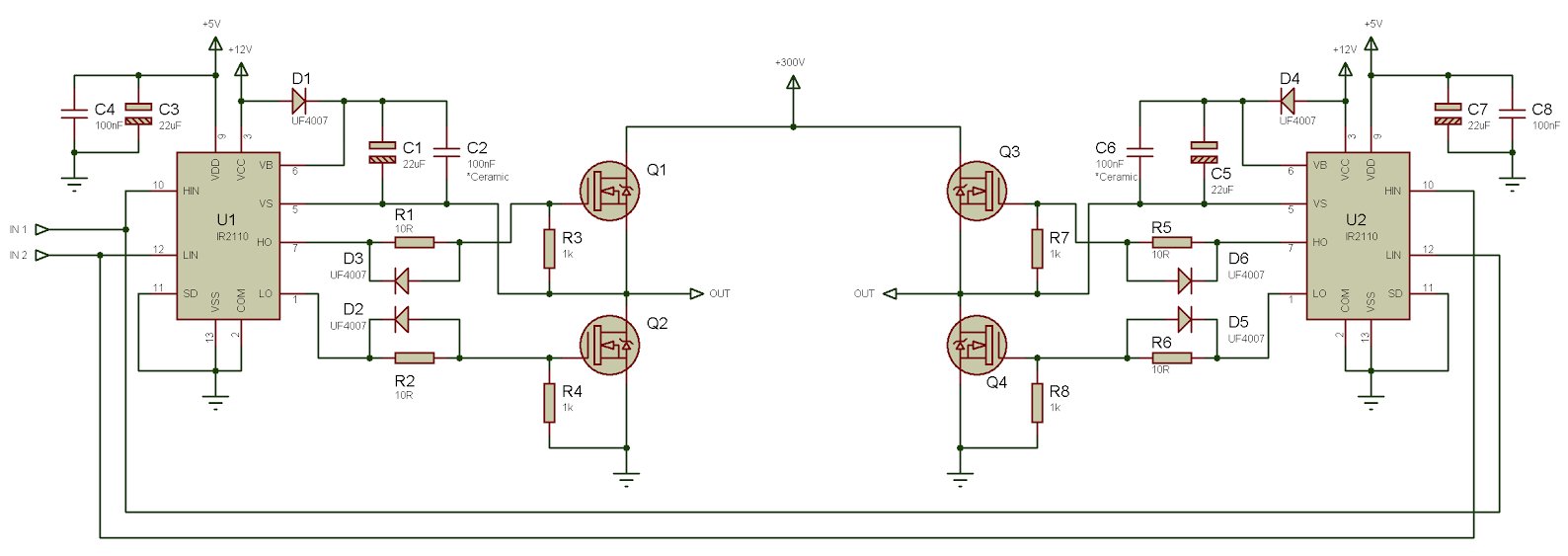
Сделал H-мост на IRF3205. По схеме классика, только с добавлением опто-развязки для управляющих сигналов, и стабилизатора 5v LM7805 в виде подачи этих 5 вольт на логические входы IR2101. http://tahmidmc.blogspot.com/2013/01/using-high-low-side-driver-ir2110-with.html Тоже самое на русском. https://habr.com/ru/post/256353/ Вот с такой поправкой схемы на IR2101. https://blog.avislab.com/ir2101/ Так же, разобрался, единственное что снизил номинал сопротивления на затвор с 10 ом до 5, и может уменьшил индуктивность проводов идущих на диоды, смотав их слегка, наверно это и дало эффект, с теми дебильными колебаниями руля по центру с драйвером не реле. Так что дело было не в механическом реле как таковом. Если честно такой простой драйвер для мотора очень порадовал. Единственный недостаток, только остался, это звук самого реле. Никаких просадок, мёртвых зон, заметных и не заметных эффектов пропажи FFB на переключениях реле нет. С твёрдой уверенностью можно считать полностью пригодным для управления мотором на поприще DIY FFB рулей. Линейность и степ на 40%. Без каких либо min force итд. Для сравнения линейка с БТС на тех же настройках. Тут было слегка Min Force добавлено в пару процентов в MMOS. Сам мосфет вообще холодный, даже не нагревается, в то время когда мотор можно "довести до кипения". Для мощных моторов, с низковольтными мосфетами нужны диоды обратной цепи. С высоковольтными можно без них. Ну вот как-то так.
-
@Basma4 выставь какие нибудь настройки, в MMOS и потом в разделе FFB Configuration, сохрани их в Eprom. Перезагрузка карты вроде для этой процедуры не нужна. После этого больше туда не сохраняй. Делай отдельные профили и сохраняй меняй их итд не трогая Eprom. Это как один из пунктов. C "SVPWM(BLDC)," это конечно интересно) Скрин настроек MMOS своих размести.
-
Нет.
-
Ну и дальше то что?
-
Не 1025, а MY1020 1000w.
-
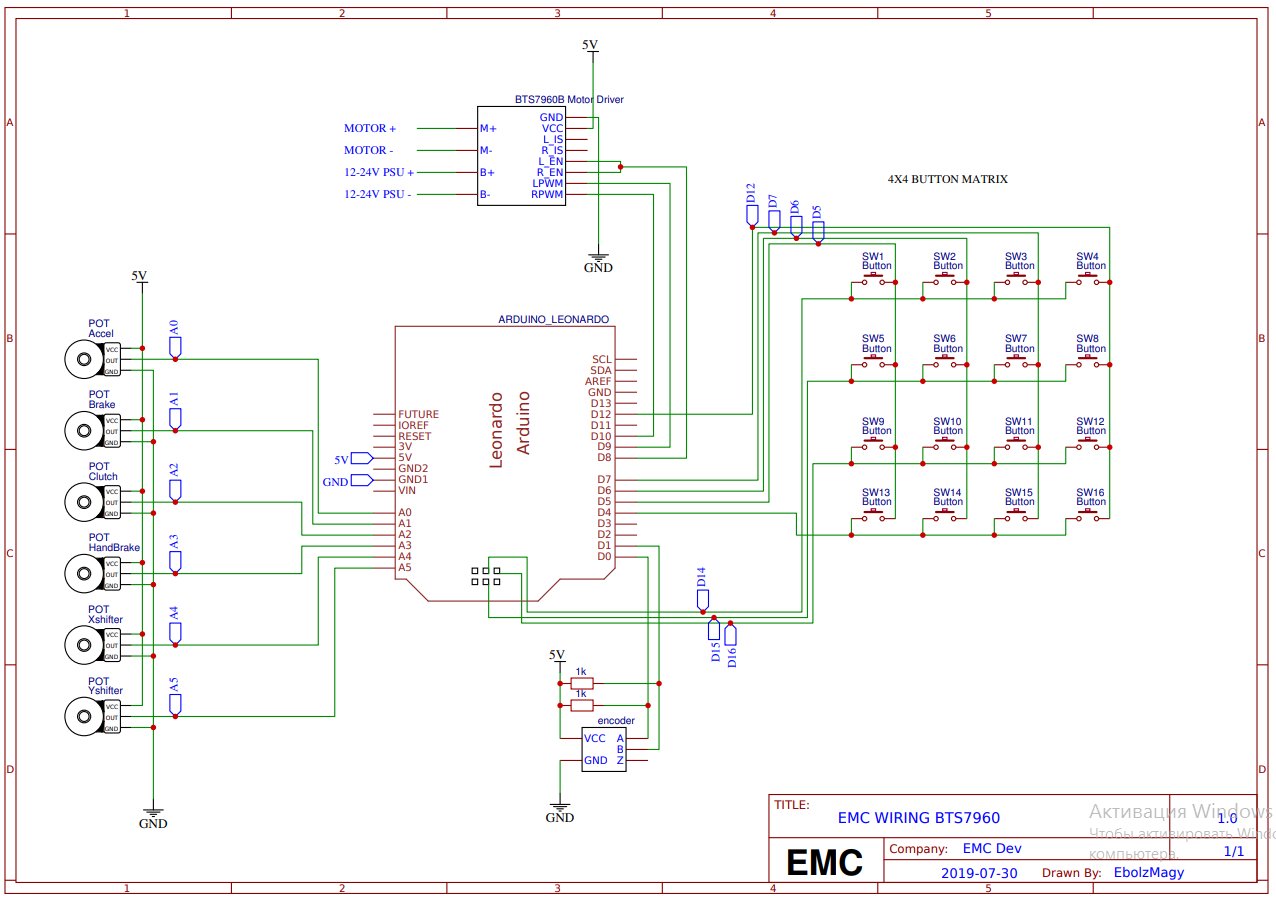
Это не новая схема EMC. Когда вы уже их перестанете путать. В новой схеме, разводка отличается.
-
@Rezinoviy_Ded та любой с AB каналами. С чего ты взял, что есть эталон по части ppr, да ещё в 3200cpr. Эталоном можно считать "всё что выше" энкодера в скм а-ля "компьютерная мышь". Юзаю 400 ppr или 1600cpr и ты знаешь, всё прекрасно)))) Это не то приложение где так нужно загоняться с разрешением. Это ерунда. Вон Итальянец поставил 10000 и обломался. Некоторым пока сами не затестят, фиг что объяснишь. Хотя есть такие которые ставят повышайки передаточных для энкодера, что было высокие разрешения энкодера)))) Я без комментариев эти их потуги оставлю) И потом не забывайте опыт каравангоса по этой части. БТС вроде как нагревался больше.
-
Та это то хорошо) Чем больше отзывов и примеров с описанием работы итд рулей на скутерных моторах, тем лучше. Зачем их называть асинхронниками только?)
-
Ничего в определении типа мотора, не смущает?) Непонятный энкодер от принтера, работающий только от aiwave, к основным используемым типам энкодеров в этих проектах, отношения не имеет, не обязательно загоняется в рамки вот "именно только этот". Но кому как)
-
Вообще-то без буковки z, всё прекрасно работает и не сбивается, с центром всё в порядке))) Караван кстати об этом тоже говорил)
-
Кому нужна калибровка и в чем её необходимость? )
-
по отличаям то в курсах, просто тогда странно что не запускается, если работало с wheelconfig. Подключи не через breadboard, совет всё равно.
-
@Rezinoviy_Ded напрасно пользуешься таким breadboard-ом для соединений. Есть ли подтягивающие резисторы? 50-500Ohm. Какое такое отличие в соединение энкодера по схеме wiring vs Wheelconfig, из-за которого оно по-твоему не работает?
-
@piradik5 ну от разных моторов, в их номиналах питания, естественно зависит тоже походу. Не сказал, что на сотне FFB и Spring Нормальная работа без вылетов. А так было, что только в десктопе спринг руль выкручиваешь, и она вырубалась быстро. Поднагревается бтска конечно. На 12шкее она вообще холодная. Ну а так на 16 khz 12v+ на одной БТС не вытащить MY моторы. На сотке в MMOS не прогонял в игрухе. Решил глянуть, на настройке полностью линейного руля, как оно. Нормальненько так кстати) Ещё глянуть сколько Nm-ов там. Думаю в районе 3х будет. Вот, так что есть альтернатива с замуткой по частоте. Уж если надо, так надо кому-то вдруг)