TOPMO3
-
Постов
1949 -
Зарегистрирован
-
Посещение
-
Победитель дней
76
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент TOPMO3
-
 Они мне наконец приехали и у них щелчок почти отсутствует в принципе. Это так и должно быть или мне какой-то китайский зашквар попался? ) пока тестирую, ловлю баги )
Они мне наконец приехали и у них щелчок почти отсутствует в принципе. Это так и должно быть или мне какой-то китайский зашквар попался? ) пока тестирую, ловлю баги ) -
Я понимаю твою логику, но что делать с тем же фанатеком или лргитеком после окончания гарантии? Либо ремонтировать втридорога , либо покупать новую модель. Тут ещё вопрос, у кого поддержка по факту будет дольше ))
-
спойлер )

-
Для сглаживания не нужна никакая гидрохрень. Любое сглаживание можно сделать программно, будет эффективно и бесплатно )
-
Спасибо, в целом понятно )
-
Рома, поделись плиз опытом - в чем смысл этого тинди? Просто торговая площадка, чтобы не заморачиваться со своим сайтом или есть еще какие плюшки?
-
А что в нем такого особенного? Стандартная конструкция, да еще и на вилвуд цилиндрах, на которые много нареканий по надежности столько же, если не больше, переходят в другую сторону и также довольны ) Конструктивно у hpp нет преимуществ перед НЕ, а на протечки также народ жалуется
-
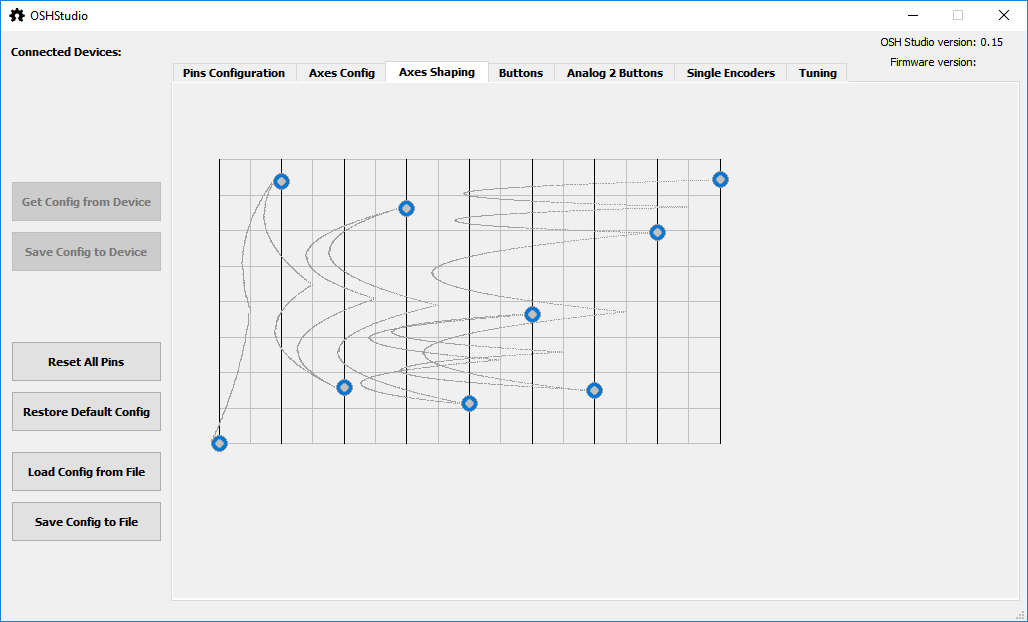
Для тонких ценителей шейпинга осей думаю вот такой пресет сделать... )
-
мне все-таки кажется, что дело не в винде. Но если соберешься чистить реестр - VID - 4617, PID - 12544
-
Привет, в этом скетче - нет, и я его больше не развиваю вот здесь поддерживаются такие свитчи
-
А как именно не работает? Как в диспетчере устройств отображается девайс?
-
@_rarдля начала просто попробуй перезагрузиться. Должно помочь с 99% вероятностью Есливсе-таки не поможет, то надо попробовать почистить из реестра все упоминая об этом vid/pid. Сходу я их не помню, вечером скину
-
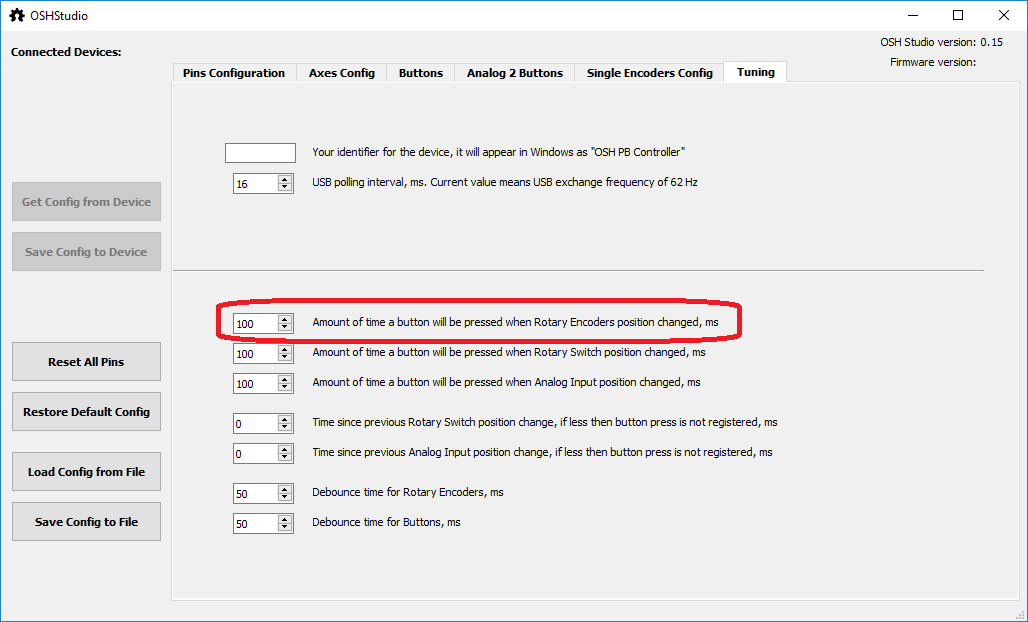
Не очень понятно. На вкладке Tuning есть параметр длительности регистрации нажатия виртуальной кнопки при вращении энкодера - если при быстром вращении различные нажатия воспринимаются как одно длинное - уменьшай его - если при быстром вращении нажатия не успевают регистрироваться - увеличивай. Какое значение у тебя сейчас стоит? блин, действительно )) кстати, то что ее нельзя изменить - просто прекрасно ))
-
Ты же параметры движка и своего привода знаешь, поэтому можно просто посчитать сколько нм и оборотов выдаёт твоя конструкция ) и не нужно будет гадать, похожи тесты на правду или нет )
-
Если речь про мою прошивку, то там это просто работает и все )) ничего корректировать не требуется У тебя вопрос из теоретической плоскости или есть какие-то реальные проблемы? ) Рома, что такое заводская прошивка? )) может мне тоже такую надо ))
-
Единственное, где там может быть нюанс - в частоте обновления. Ранние версии wheelcheck собирали данные с частотой 1ms по дефолту, поэтому все графики сделаны для такой частоты. Если ты пользовался более поздней версией, то проверь, что у нее частота стоит 1ms или можно поправить сам csv файл (каждую строчку продублировать) За проект респект! ) На видео баранка крутится довольно резво, думаю, что этот руль должен быть не хуже как минимум CSW )
-
HDMI первой версии не умеет больше, чем 60hz. Подключай через dp или dvi
-
заказал, буду пробовать )
-
CTS MC288-V или CTS MC288-X на эту плату их надо подцеплять как single encoder 1/4 type. Единственный минус - нельзя сделать chained конфигурацию. Насчет кнопки - сколько энкодеров я видел, кнопка всегда идет 2мя отдельными контактами Это даже не энкодеры в классическом понимании, а pulse switch, т.е. их можно цеплять к тем платам, которые имеют обрабатывать только кнопки. Для данной платы нет смысла их использовать )
-
Да, это прошивка программатора обновилась. Залей последнюю .15 версию и апп такой же версии используй
-
@_rar, нет, плата просто должна быть подключена и все. Какой версии и прошивка, и прога?
-
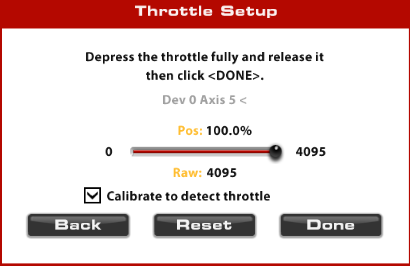
Просто я хочу быть уверен, что у меня в минимальном положении педали показывает четко 0, а максимальном - ровно 100% ) По этим виндовым картинкам же ниего не понятно. iR видит 4095, а что ему еще видеть? В этом же смысл аппаратной калибровки ) Выглядит вот так: У Кирилла какая-то совсем странная проблема, пытаемся разобраться )
-
Во-первых, всем спасибо за мнения! ) Отвечаю по пунктам ) Да, планирую в следующей версии. Хотя на мой взгляд, именно для load-cell педалей это не столь актуально. Тормоз имеет нелинейную характеристику по конструктиву, газ наоборот имеет линейную характеристику по конструктиву )) Разве что для сцепы, но думаю для нее (т.е. для момента схватывания и отпускания) должно хватить обычной калибровки. В основном я хочу это сделать для педалей с потенциометрами, с приводом штангой, например как у РТ педалей. Такой привод имеет не совсем линейную характеристику и это можно было бы как раз исправить шейпингом осей. Не знаю, насколько практическая фишка, но как минимум маркетинговая )) Почему это, как минимум я осознал всю глубину проблемы, если я даже тебе, человеку, который прекрасно понимает что такое калибровка и оси, даже тебе я уже вторую страницу пытаюсь объяснить, что же там у меня отображается. )) Лично мне вот это нравится лаконичностью и информативностью. Но по-моему тут те же самые проблемы, что и меня. Что означает абсолютная величина, значения АЦП? А значение прогресс-бара/проценты - уровень оси? Т.е все то же самое - в отсутствии калибровки имеем сигнал на половину прогресс-бара, после калибровки шкала растягивается, пользователь недоумевает, что происходит. По сути, здесь просто убраны ползунки и добавлено значение АЦП, а принцип тот же самый Почему же искусственная? Это именно те значения, которые определяются в винде, RAW значения, для нее это единственная истина )) Про АЦП ей ничего не известно. Поэтому я хочу видеть именно ее, эту величину, чтобы знать, что видит винда Они всегда шумят, они так работают ). А по сути согласен, в следующей версии будет более эффективный алгоритм сглаживания, который я надеюсь уберет любое дрожание оси при минимальной задержке Чем дальше двигать ползунки в центр, тем больше будет мертвая зона. 1. Например, если в начале оси вообще нет калибровки, то ось будет двигаться сразу же, как только АЦП начнет передавать хоть какое-то значение (АЦП преобразовывает сигнал датчика в последовательность цифр от 0 (нет сигнала) до 4095 (макс уровень сигнала). В этом случае никакой мертвой зоны нет в принципе, любой появившийся сигнал с датчика - 1,2,3 и .т.д - сразу же транслируется в значение оси 2. Допустим, мы сделали нижний порог калибровки 200. В этом случае, сигнал с датчика от 0 до 200 просто отбрасывается. Т.е. тот начальный ход педали, который зафиксируется датчиком от 0 до 200, он никак транслироваться в ось не будет, это будет мертвая зона. В ось будут транслироваться только значения от 200 до верхнего порога калибровки. Если сделать нижний порог калибровки, например в 4090, то почти весь диапазон датчика будет мертвой зоной и т.п. В конце оси калибровка действует аналогично, только в другую сторону ) Олег, тут понимаешь в чем дело, это было изначально сделано для самодельщиков и это универсальный контроллер, туда понапихано много функций и его много где можно использовать, а не только в педалях. Имхо будет нелогично, если я среди всего этого поставлю еще какой-то визард, который все равно потеряется в этих вкладках ) По-хорошему, надо для педалей Андрея сесть и написать отдельную спец прошивку и отдельную прогу, чтобы там не маячили никакие кнопки, энкодеры и проч не относящиеся к педалям элементы ) В проге сделать два режима - 1. простой, примерно как ты описал и 2. типа экспертный, где можно просто выставить все значения руками. Я думаю, мы придем к этому рано или поздно ) Если ты например катаешь только в ир, то как вариант, можно вообще не заморачиваться с калибровкой в контроллере. Выставить все ползунки в крайние значения и откалибровать все в самом ире. Результат будет тот же самый Посмотрим, думаю должно хватить, т.к. нам такой точности и не нужно, чтоб прям плавающую точку использовать Это какой-то твой собственный проект или тоже педали Андрея? Если напишешь, что именно не получалось, то я помогу с калибровкой. Минусовых значений там не может быть (не должно )) ), поэтому мне даже интересно что там такое было. Можно, но это сейчас не в приоритете. Все-таки большинство пользователей проекта - зарубежные, поэтому сделано все на английском, как наиболее универсальном языке. Тут же все равно - один раз настроил и забыл
-
Можно нарисовать там значения АЦП, но тогда значения оси придется смотреть либо средствами виндовс, либо программами типа DXTweek. Просто неудобно использовать 2 проги вместо одной, сейчас же все сразу в одном месте. Просто я криворуко нафотошопил. На самом деле я все больше к этому 3му варианту склоняюсь Пример - нарисуем два прогресс бара, один показывает значения АЦП, второй значения оси. Ползунки калибровки находятся над шкалой АЦП, что логично. Эта шкала показывает "условно честные" RAW значения. Обзовем ее "sensor value", чтобы было понятно, что это значения напрямую с датчика. Ниже нарисуем шкалу со значениями непосредственно оси, чтобы результат нашей калибровки был сразу виден, не отходя от кассы. Обзовем ее "axis value" 1. Калибровки нет, оба прогресс бара показывают одинаковые значения АЦП. Начальное состояние до калибровки 2. Ориентируясь на значения "sensor" шкалы, сделали калибровку. Эта sensor шкала по-прежнему показывает прежнее значение с датчика (что логично, т.к. сигнал с датчика не изменился), а шкала оси теперь уже показывает макс значения, в соответствии с нашей калибровкой естественно, это все надо сделать покрасивее, эти картинки только для понимания сути этого варианта
-
Нет, именно на 3450 ) Калибровка накладывается не на ось, а на значения АЦП. Т.е. в нашем примере в первом случае контроллер растягивает диапазон значений АЦП с 0 до 3500 в диапазон оси с 0 до 4096 во втором случае контроллер растягивает диапазон значений АЦП с 0 до 3450 в диапазон оси с 0 до 4096 В ГУИ отображается именно эта ось, по сути только для контроля, какие значения оси выдаются контроллером