TOPMO3
-
Постов
1949 -
Зарегистрирован
-
Посещение
-
Победитель дней
76
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент TOPMO3
-
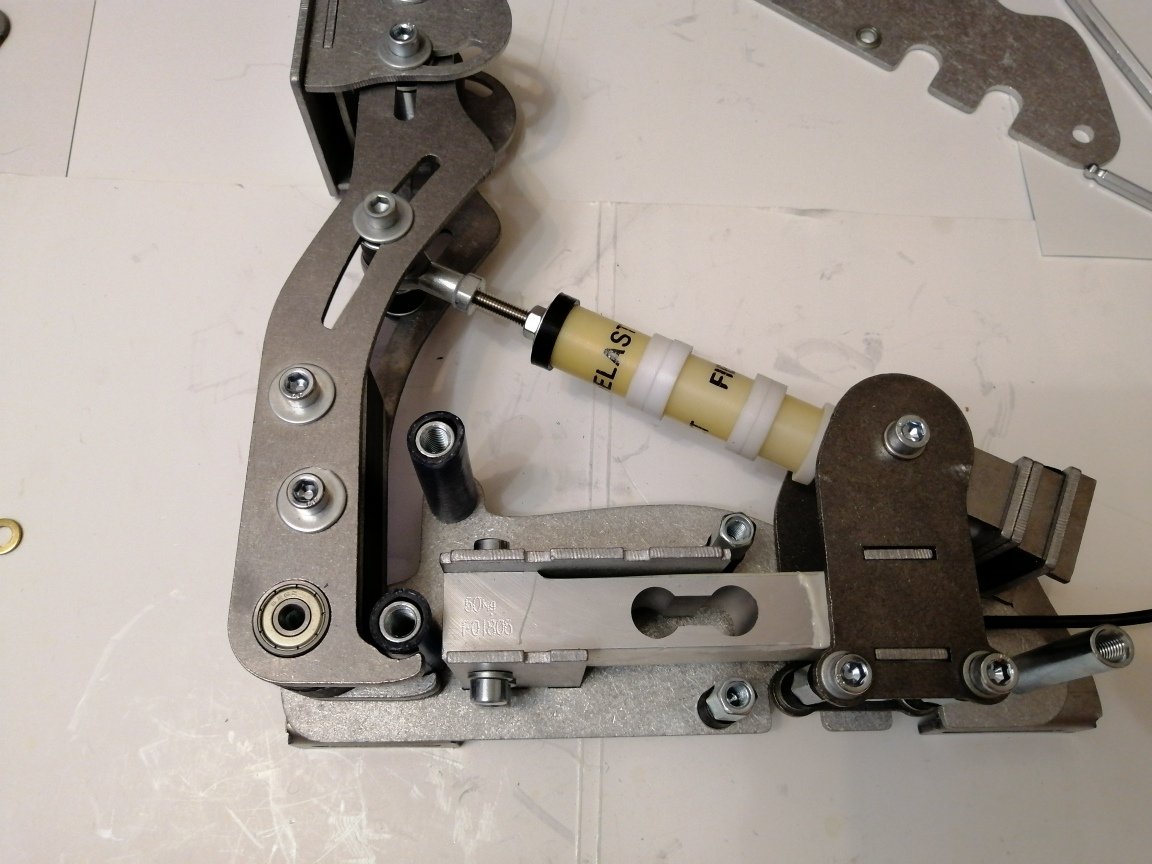
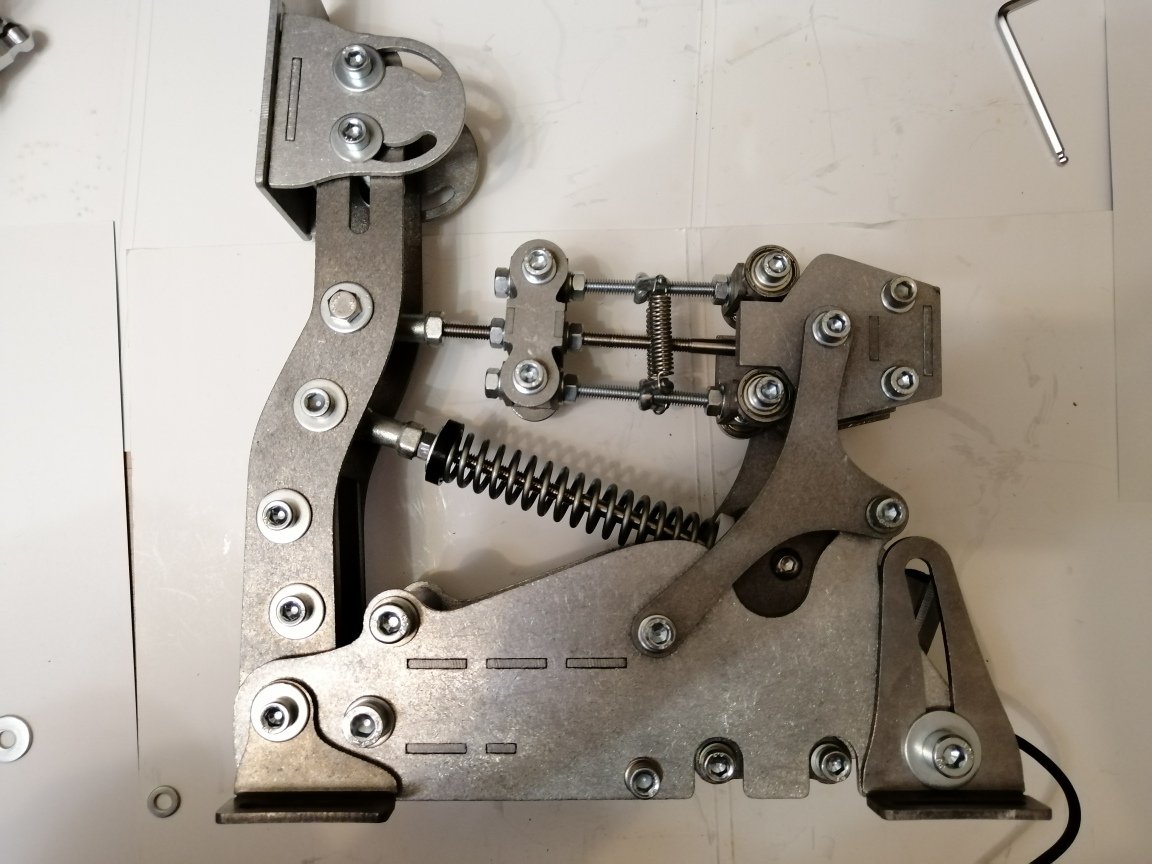
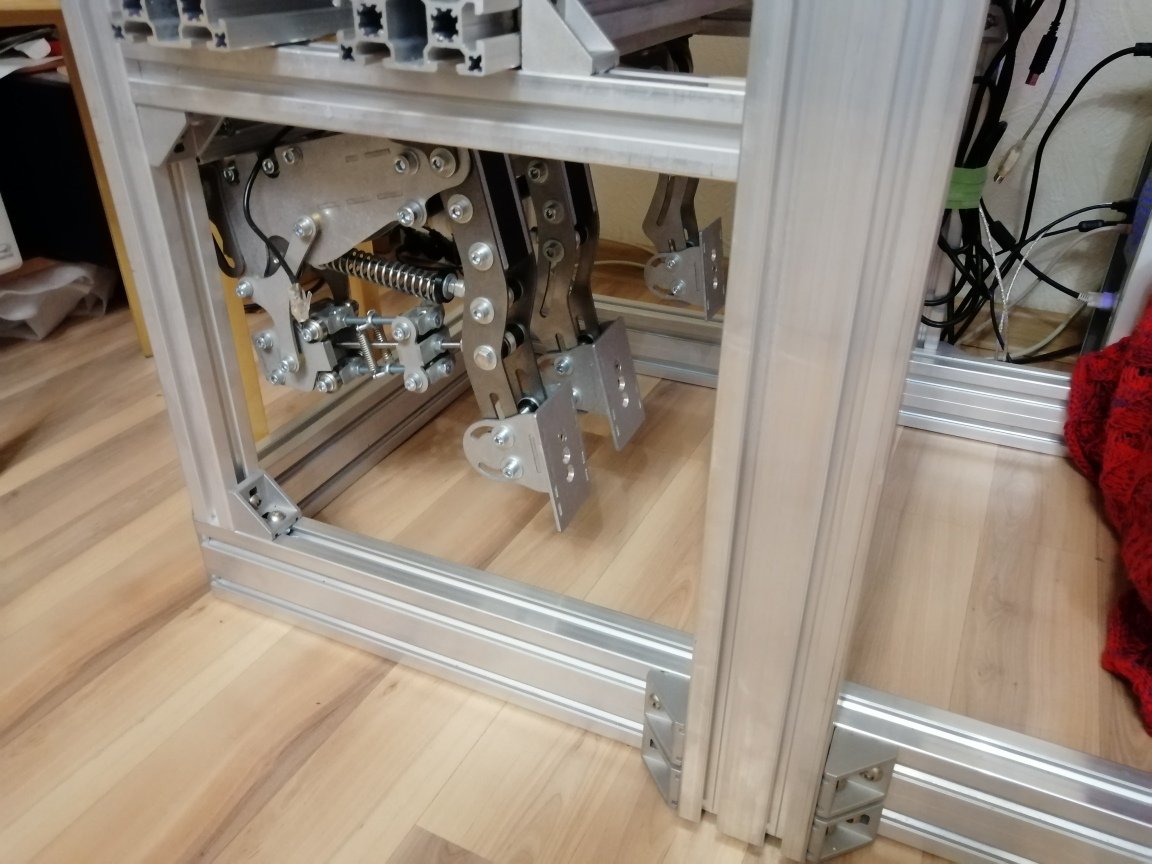
 Напишу тоже кратенький "отзыв", по технической стороне вопроса (для адептов техносекты) Как известно, все 3 педали Андрея имеют LoadCell датчики. Выглядит это вот так: Соответственно никаких трущихся частей как в потенциометрах или трудности настройки как в холлах нет. По фотке видны упоры педали для обеих положений, можно прикинуть диапазон возможного хода. Для педали тормоза все аналогично, только вместо пружины - эластомеры (на фотке мои, покупал наверно еще лет 5 назад для своих самоделок). Датчик на 100кг На тормозе есть возможность регулировать силу нажатия стандартным образом - изменением высоты штока. По моим примерным оценкам, при минимальном усилии, когда шток максимально сдвинут вниз - чтобы выжать максимум 100кг датчика - нужно приложить чуть больше 20кг на площадку педали; при максимальном усилии - придется давить под 300кг. Ход педали зависит от жесткости эластомеров На главной оси стоят нормальные подшипники, поэтому нет проблемы появления люфтов из-за износа стенок как в НЕ ) Одна из фишек, которую я нигде больше не видел - возможность изменить наклон площадки (изменяется в очень больших пределах, по факту столько не требуется) ) Что меня поразило - это механизм сцепы. Это какое-то произведение искусства ) Вот так выглядит блок сцепы отдельно Я думаю, что принцип действие по фото понятен - нелинейность усилия достигается профилем в правой части, а величина усилия - расположением пружин. В результате эффект размыкания дисков хорошо выражен и без проблем настроить силу под себя Педалька в сборе довольно монструозно выглядит )) Ну и гибкость, которую дает такая конструкция отдельных педалей - тоже большой плюс. Я смонтировал их в инвертированном виде, какую-нибудь гидравлику так поставить вряд ли получилось бы из-за резервуаров.
Напишу тоже кратенький "отзыв", по технической стороне вопроса (для адептов техносекты) Как известно, все 3 педали Андрея имеют LoadCell датчики. Выглядит это вот так: Соответственно никаких трущихся частей как в потенциометрах или трудности настройки как в холлах нет. По фотке видны упоры педали для обеих положений, можно прикинуть диапазон возможного хода. Для педали тормоза все аналогично, только вместо пружины - эластомеры (на фотке мои, покупал наверно еще лет 5 назад для своих самоделок). Датчик на 100кг На тормозе есть возможность регулировать силу нажатия стандартным образом - изменением высоты штока. По моим примерным оценкам, при минимальном усилии, когда шток максимально сдвинут вниз - чтобы выжать максимум 100кг датчика - нужно приложить чуть больше 20кг на площадку педали; при максимальном усилии - придется давить под 300кг. Ход педали зависит от жесткости эластомеров На главной оси стоят нормальные подшипники, поэтому нет проблемы появления люфтов из-за износа стенок как в НЕ ) Одна из фишек, которую я нигде больше не видел - возможность изменить наклон площадки (изменяется в очень больших пределах, по факту столько не требуется) ) Что меня поразило - это механизм сцепы. Это какое-то произведение искусства ) Вот так выглядит блок сцепы отдельно Я думаю, что принцип действие по фото понятен - нелинейность усилия достигается профилем в правой части, а величина усилия - расположением пружин. В результате эффект размыкания дисков хорошо выражен и без проблем настроить силу под себя Педалька в сборе довольно монструозно выглядит )) Ну и гибкость, которую дает такая конструкция отдельных педалей - тоже большой плюс. Я смонтировал их в инвертированном виде, какую-нибудь гидравлику так поставить вряд ли получилось бы из-за резервуаров.
-
@Logan_52, В подписи все есть https://opensimhardware.wordpress.com/diy-контроллер-для-педалей-и-кнопок/
-
Да не верю. Любой айтишник, проработавший пару лет, не сможет такой бред написать. А уж спецы старой закалки, которые этот машинный код вручную набирали - тем более. И про то, что у ты вот так без бубна компилишь ассемблерные исходники какой-то досовской игрушки - тоже не верю) Какой уж тут симпозиум - детский сад, штаны на лямках)) Но это все детали, мне просто не понятно, почему ты пишешь всякий бред, если совсем не разбираешься в теме, ну вот с какой целью???
-
Нет, это как раз не бред, это называется обратная совместимость. Только к чему это? Вот есть например у оракла сервак Х8-8, в одной коробченке 192 ядра и 6ТБ памяти. Это х86 архитектура. Это толком масштабируемость или не толком? Что такое линейна по сути?? Во-первых, что такое "машинный язык"?? Этот термин никто не использует. Если ты имел ввиду "машинный код", то все в него переводить не только можно, а просто необходимо, т.к. железка может выполнить только машинный код. И нет, машинный код это не ассемблер. Т.е. эта процитированная фраза для меня лишена смысла, отдельные слова вроде все понятны, а в осмысленное предложение не складывается
-
извини конечно, но это какой-то бред )
-
Да, конечно
-
Да, правильно. Обычный пот работает, если подключить?
-
Инфа от производителя, откуда еще? ) https://heusinkveld.com/wp-content/uploads/Sprint_Preview_Digital_11092018.pdf?v=f9308c5d0596 Теперь о рычагах. Очевидно, что сама по себе "емкость" датчика ничего особо не значит, а в большей степени влияет система рычагов педали. Я сейчас прикинул по конструкции АЗ и примерно получается, что в самом мягком положении (шток максимально вниз) - чтобы получить 100кг на датчике, нужно приложить 52кг на площадку педали. В самом жестком положении - нужно приложить 289кг. Так что я не понимаю претензии к "слабому" датчику АЗ
-
У спринтов датчик на 120кг
-
Скинь ссылку такого датчика для примера
-
Это мне нужно списаться с разрабом симхаба, чтобы мы подружили стм и его софт. Есть такие планы, но уже в следующей версии
-
Да, этот тип пина называется analog to buttons, на отдельной табе можно настроить до 10 кнопок на вход. Один человек подкинул интересную идею - соединить выводы галетника через резисторы и так получить несколько нормально разделённых тактильно кнопок на всего один пин. Много галетников имеют 12 положений, поэтому буду расширять кол-во возможных кнопок с 10 до 12
-
Попробуй полностью очистить сохранённый конфиг и записать сразу уже готовый, тот который нужен. Похоже, что в 16 версии какая-то бага с сохранением конфига, несколько людей написало мне об этом. Я пока в отпуске нахожусь, детально посмотреть не могу. Лучше всю инфу какая есть (или действия по шагам, которые приводят к ошибке) мне скинуть в личку или можно сразу issue запилить на гитхабе. Как разгребу буду разбираться После прошивка плата становится недоступна для st-link, это нормально. Для заливки новой прошивки надо переставить джамперы. Что такое отвал бороды я не знаю)) Да, есть такой спецэффект, пока думаю на какую-то кривость в usb-дескрипторе, там ещё и другие глюки с ним есть, тоже надо разбираться с этим...
-
Я не нашёл bldc сильно дешевле, чем pmsm, а последние по технической части получше будут
-
Асинхронный мотор не подойдёт, у него ротор не следует чётко за магнитным полем. Т.е.при стартах/остановках будет лаг, сильное влияние от нагрузки на валу и т.д. Симулятор баржи наверно можно сделать)
-
Отсюда https://members.iracing.com/jforum/posts/list/175/3631873.page#11614373
-
Beano с ировского форума, который перепробовал наверно все что в принципе существует, променял свои алтимейты на самодельную гидравлику. А из серийных лучшими по ощущению тормоза считает prosim My reference to hydraulic brakes at this point in time is the unit from ProSim, which is an excellent piece of kit, very well-engineered, with a rigid, stout actuation-unit.....it will last a lifetime in this application, and the Belleville stack is infinitely adjustable, provided you buy a variety of washers, but even with the ones provided with the kit, it should satisfy even the hardcore amongst us.
-
https://github.com/OpenSimHardware/Buttsimp/blob/master/buttsimpjoy_02d.ino
-
Это какой скетч, с эмуляцией клавы? В скетче с джойстиком емнис виртуальная кнопка горит столько же, сколько нажата виртуальная
-
А сейчас они не распознаются? Пока непонятно, распиши проблему поподробнее
-
Да, ты прав наверное) В любом случае сейчас обдумываю как переделать дизайн с учётом того, что в дальнейшем кол-во реальных и виртуальных кнопок может отличаться
-
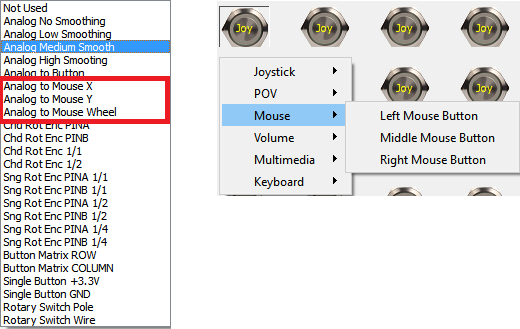
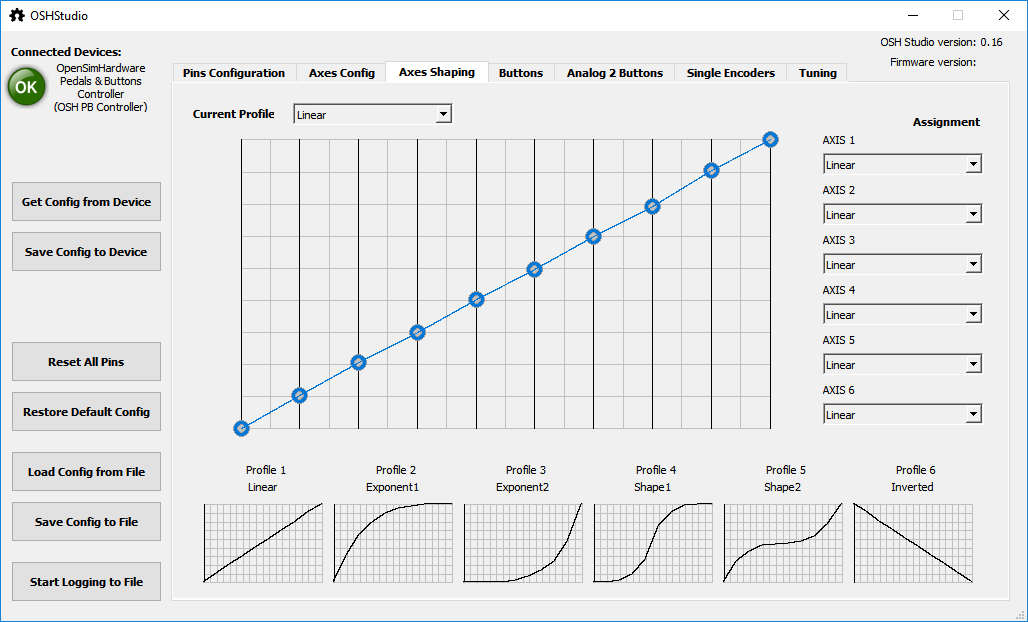
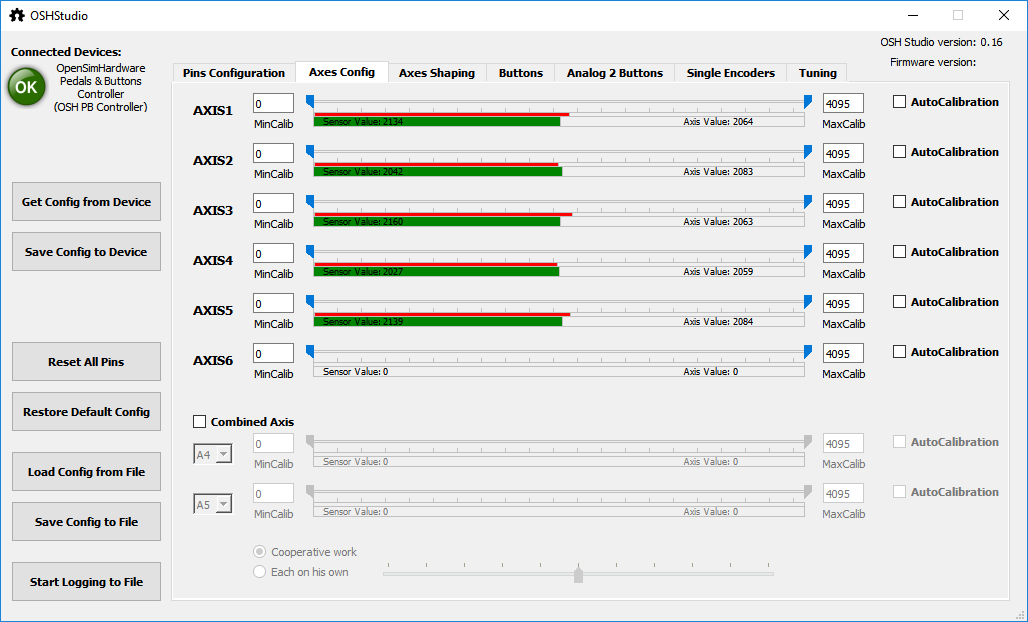
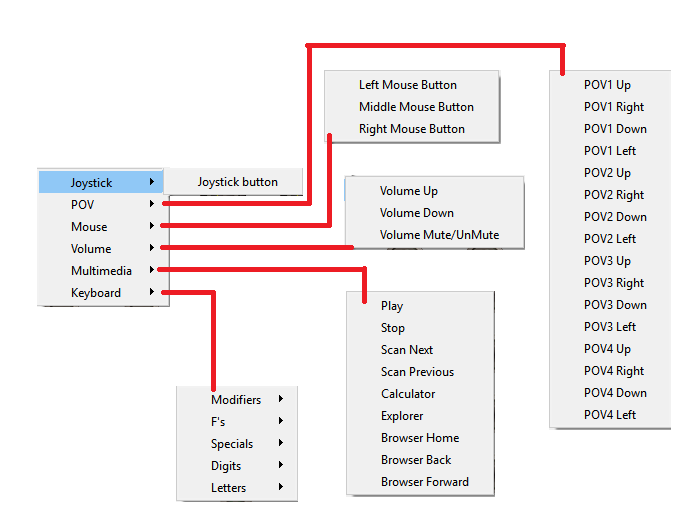
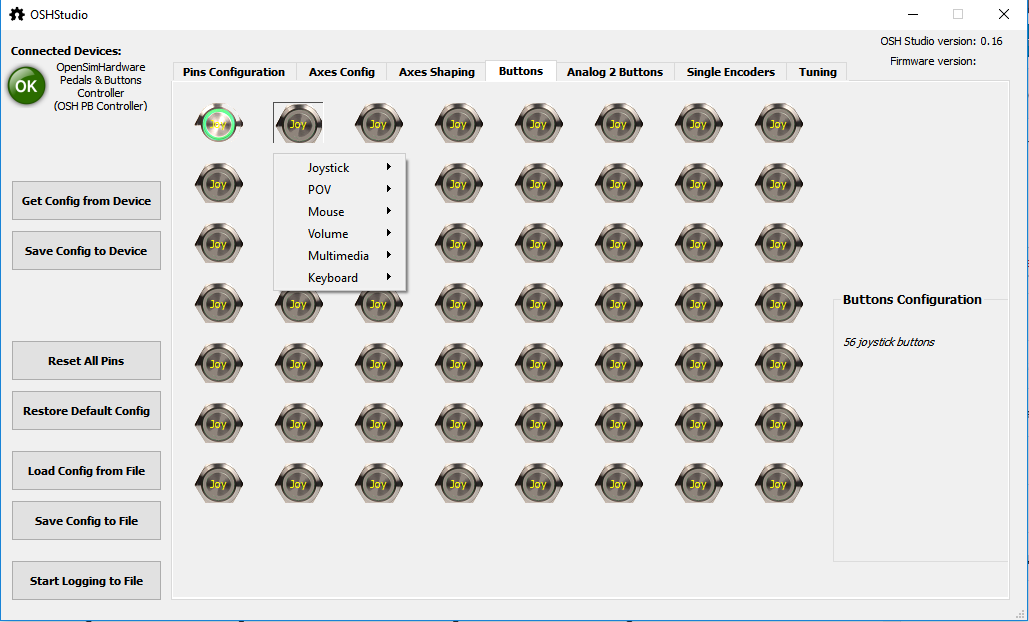
версия 0.16 новые фичи: - добавлена эмуляция клавиатуры и мыши. С помощью первого можно например назначить на кнопки всякие фишки типа регулировки громкости звука, запуска браузера, перелистывания треков и т.п. В помощью второго можно например поставить на баранку маленький аналоговый джойстик и использовать его как мышь. Функции для кнопок назначаются на вкладке Buttons - теперь при калибровке осей показывается значения не только самой оси (зеленый бар), но и непосредственное значение датчика (красный бар). На мой взгляд, теперь довольно понятно, что происходит при калибровке. Если есть еще какие-то идеи и замечания - пишите ) - шейпинг осей
-
не вижу разницы, если честно ) людям точно так же можно дать пэйпал ссылку, и не будет переводов карта-карта, если опасения именно из-за этого. Но налоговая ведь не думает, что на пэйпал счете у тебя деньги от сырости заводятся? )) явно их не официальный работодатель туда переводит Так что думаю, что дело только в суммах, которые летают. На симрейсинге особо не заработаешь, так что нам волноваться нечего, я считаю ))
-
Рома, ты же с пейпала все равно на счет выводишь, так что какая разница? Я наоборот завел себе тинькоф блэк и плачу ей везде (не светить же зарплатную в инет магазах) , много денег на ней не держу - если данные утекут, то и не страшно постоянно закидываю на нее небольшие суммы с основной карты, проблем не было никогда. В той ссылке что-то недосказано. Может, человек там регулярно проводил цепочку переводов между банками, чтобы сложнее было отследить источник бабла. Либо источник сразу был сомнительный