Beg
-
Постов
363 -
Зарегистрирован
-
Посещение
-
Победитель дней
28
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Beg
-
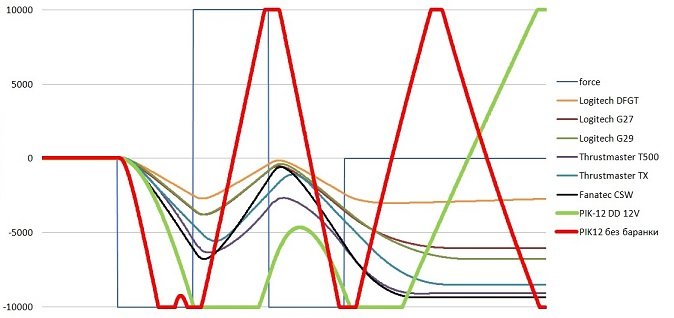
 если мы говорим о DD на моторах постоянного тока (например из протестированной серии моторов типа PIK12), то мощность нужна больше, чтобы получить крутящий момент на стоячем руле уровня хотябы Thrustmaster T300 - надо порядка 250 Вт мощности как минимум! крутящий момент можно увеличить, используя схемы с редукторами различных типов, но тогда упадет скорость руля и кроме того выходная механическая характеристика станет очень крутой (другими словами сила ффб будет очень сильно зависеть от скорсти и направления вращения руля - напомню что при максимальной скорости электродвигателя на нем нет полезного крутящего момента совсем - а если бы он был - он бы раскрутился бы еще быстрее)
если мы говорим о DD на моторах постоянного тока (например из протестированной серии моторов типа PIK12), то мощность нужна больше, чтобы получить крутящий момент на стоячем руле уровня хотябы Thrustmaster T300 - надо порядка 250 Вт мощности как минимум! крутящий момент можно увеличить, используя схемы с редукторами различных типов, но тогда упадет скорость руля и кроме того выходная механическая характеристика станет очень крутой (другими словами сила ффб будет очень сильно зависеть от скорсти и направления вращения руля - напомню что при максимальной скорости электродвигателя на нем нет полезного крутящего момента совсем - а если бы он был - он бы раскрутился бы еще быстрее)- 733 ответа
-
- 2
-

-
- mmos
- direct drive
- (и ещё 2 )
-
Приветствую! На 200вольт? Ну если только планируется высоковольнютный Н-мост (а не bts7960) Второй на 24в возможно, но он слабоват будет, в номинале всего 55 Вт
-
@lenynnn,толщина вала придаёт жёсткость на изгиб всей конструкции, там же ещё наращиваться надо для установки баранки Да и в целом приятно когда можно уперевшись в руль сидушку подвигать взад - вперёд, да и весь кокпит из профиля за руль потаскать)
-
@lenynnn приветствую, болгарские моторы PIK, сделаны покачественнее сами по себе чем китайские MY1020, имеют в двое больший диаметр вала, да и вес поболее так сказать повнушительнее будет железяка Моторы My1020 имеют не совсем плавный ход, в них чуть чуть прощупывается ступенчатость, авторы дд баз на них говорят что это не критичный момент На pik12 же я никак, как не пытался не мог почувствовать ступени, какое то примагничивание ротора к статор в определенных углаха, так же под нагрузкой я не мог почувствовать моменты переключения обмоток на коллекторе когда на мотор шло линейное усилие Однако проект дд на My1020 вполне имеет место быть, вот тут можно почитать с переводчиком много страниц темы такого проекта на итальянском форуме https://www.drivingitalia.net/index.php?/forums/topic/76596-volante-direct-drive-con-arduino-stm32/#comments Автор темы сравнивал свой проект со своим старым т500, и писал что дд my1020 значительно превосходит по качеству ффб его т500 Мне pik12 в состоянии нового достался в несколько раз дешевле чем стоит My1020, поэтому изначальные мысли постройки дд на My1020 меня покинули)
-
Всем привет! это снова я (: комплект директ драйва из первого поста этой темы был со слезами на глазах продан/отдан по себестоимости входящих в него комнонентов другу, и теперь DD руль радует новго владельца, ну а я ... а я буду собирать новый ДД, тоже на болгарском двигателе 1ПИ12, в надежде получить новый опыт, да и просто наверно как хобби) вот такой двигатель мне предоставил товарищ: внешне состояние с царапинами, но внутри все новое, крутится он так же плавно как и серия PIK12 номинальный момент заявлен 3,5н.м. (против 1,5 н.м. pik12), пиковый/импусльсный момент должен быть ~15 н.м. (из технических характеристик) заказан новый комплект электроники, буду держать вас в курсе!

- 733 ответа
-
- 2
-

-
- mmos
- direct drive
- (и ещё 2 )
-
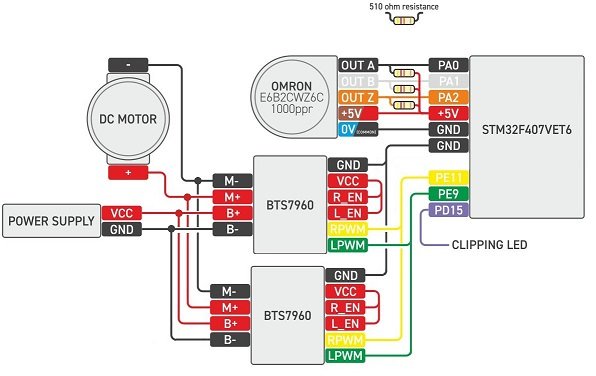
@igoren174 по закону ома расчитать и подключить последовательно с резистором к 5В давай помогу, падение на диоде 1,16В, падение на резисторе 5-1,16 = 3,84В сопротивление = напряжение/ток = 3,84/0,055 = 70 Ом берем ближайщий из стандартных 75 Ом
-
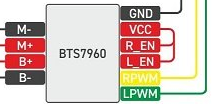
ок, http://arduino.ru/forum/otvlechennye-temy/logitech®-momo-racing-peredelka-pod-svoi-nuzhdy Провода, подходящие к плате энкодера: Жёлтый – GND Зелёный – питание (5В) Красный – питание светодиода (5,5мА, падение напряжения на сетодиоде – 1,16В) Чёрный и Белый – А и В каналы энкодера.
-
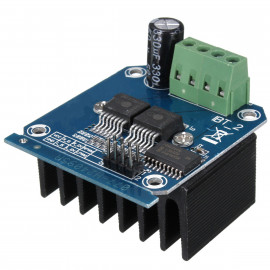
@igoren174 мы тут почти все используем H-мост на чипах BTS/BTN 7960 но для слабенького мотора МОМО это будет "жирно", если есть в планах собирать руль на нормальном мощном моторе, то пригодится по первой ссылке Н-мост не подойдет, мотор у МОМО на 24В, а мост только до 12В, мотор и без того слабый на пониженном напряжении далеко не уедет у энкодера логитеча 2 провода отвечают за питанеи светодиода, и 2 провода за выходы (выход с 2х фотодатчиков)
-
@igoren174 приветствую, модуль мосфет транзистора не подойдет для управления мотором, т.к. нужен H-мост из 4х транзисторов (для смены направления движения) как сорбрана схема с энкодером? может в ней таится разгадка?
-
@ksg79 уголок как у меня :) можно подробней как QR сделал? что внутри, и как зафиксировал его на валу двигателя?
-
@Sem земляк, приходи в гости, потестишь) Если что - потом помогу собрать похожий (только бы мотор найти) доставка из Новосиба мне вышла в 500р (боксберри - Юла)
-
это двигатель высокого напряжения (220 В) запитать его через BTS7960 не получится (не более 27 В)
-
если что вот движки на авито! успевайте :) https://www.avito.ru/moskva/bytovaya_tehnika/elektro_dvigoteli_1976472456
-
1. Выкрутить 4 пластиковые крышки и вынуть щетки 2. Выкрутить 4 винта под отвертку спереди мотора, после этого корпус двигателя можно будет разделить на 3 части (передняя крышка/центральная часть с магнитами и задняя крышка)
- 733 ответа
-
- 1
-
-
- mmos
- direct drive
- (и ещё 2 )
-
Вот видео ещё до окончательной сборки (для оценки скорости) По моменту как и писал выше - намерял 8.1 н.м. Это выше всех серийных ременных/шестеренчатых рулей
-
@Sieben а зачем нам инверсия, если надо проверить каналы BTS - LPWM и RPWM, Вы читали предыдущие сообщения? С чего Вы взяли что надо инвертировать мотор? У человека силы в одну сторону нет, тогда для чего менять что то одно (например полярность на выходе с BTS) Да да, что за бред в этой ситуации предлагать менять например М+ и М- местами?
-
Неправда, если поменять только силовые выходы на мотор - то в софтлоке руль провалится и будет наматывать до посинения угол все дальше и дальше - тоже самое будет и если поменять только REN и LEN местами Если перевернуть сигнал и на входе и на выходе (вот именно так, как я написал выше) , то при вращении например влево в Н-мосте будет задействована уже другая пара транзисторов, при этом руль должен корректно работать по направленям/силе
-
@ArchiRA для проверки первое что бы я сделал: 1. убедился в исправности BTS7960 - подключил скрутку LEN+REN+VCC бтс-ки к +5В на стм, 2. далее если проблема не поменяется - поменять "плечи" bts - для этого надо поменять местами провода на контакты (PE9) <-> (PE11) и поменять местами силовой выход BTS (М+) <-> (M-) пина "PE09" нет, есть "PE9" - подключение точно правильное? дальше предлагаю проверить исправность STM32: 3. для этого вместо BTS подключем 2 светодиода к выводам PE9 и PE11 на GND соответвенно (через резисторы ~200 Ом будет достаточно) ну и соответвенно светодиоды должны загораться с разной яркостью (в зависимости от направления FFB ) - в соответвии с % усилия (с коэфф. скажности ШИМ сигнала) P.S.: на всякий случай можно еще проверить входные сопротивления входов LEN и REN, а то вдруг там китайцы криво напаяли и на массу кз получилось...
-
@Tim_99 лучше ставить наоборот проценты - максимум в драйвере, и убавить в самой игре, для того чтобы не было клиппинга(зашкаливания/перегрузки) в самой игре сила обычных эффектов останется такой же (условно с коэфф. 0,85), а вот мощные могут работать чуть сильнее без перегрузки и давать дополнительную информацию
-
нет, меньше напряжения - меньше ток, меньше момент проблема в том, что на номинальном напряжении если не давать мотору некоторое время свободно вращаться (т.е. держать руками) он попросу сгорит, поэтому как показывает практика используют пониженные напряжения на номинальный момент на двигателе надо смотреть сквозь пальцы, т.к. пусковой (когра мы его держим руками в разы больше указанного номинального даже на пониженном напряжении) пик 12-3/10-1 при указанных номинальном/максимальном моментах 1,5-3,0 н.м. при напряжении 30В на мощном БП 12В при напряжении 12,15В дал ~8 н.м. момента на АКБ от ИБП 12В при напряжении (оно просело) 10,5В дал ~ 7.2 н.м. момента не смогу подсказать, ибо не рассматиривал данные двигатели так же не могу впринципе подсказать по другим моторам, ибо для "наших" целей есть два очень важных момента, которые не документируются характеристиками 1. постоянноство крутящего момента от угла поворота 2. отсутсчтвие "фиксации" по полюсам статора это все нужно чтобы мы не чувствовали никаких ступеней, примагничиваний, моментов переключения обмоток на коллекторе и привод оказался максимально (насколько это возможно) "линейным" из самого дешевого варианта если на 12В - то можно использовать серверные блоки питания/либо майнеровские ... можно поискать на авито там токи 100А они легко держат можно не факт конечно чт о они работают синхронно, но схема вполне себе является рабочей на самом деле внешне он выглядит внушительно... если недорого то почему бы и нет? я бы попробовал) тем более в DIY не интересно полностью копировать чужой проект, всегда хочется внести что то свое) (ну это я бы так сделал)
-
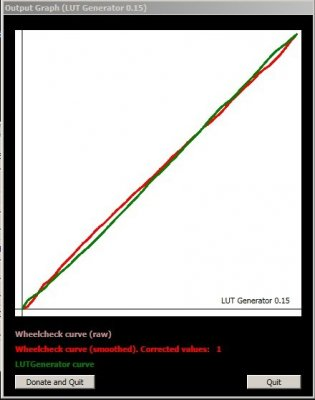
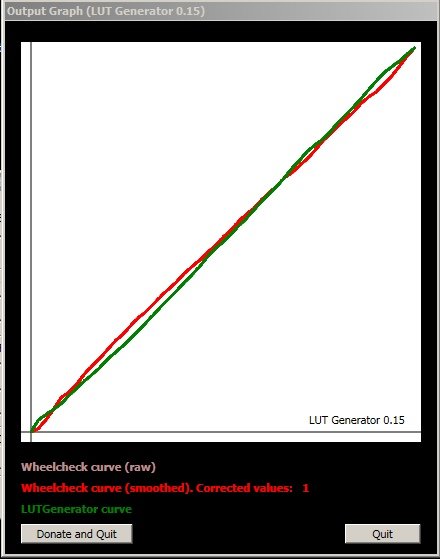
мне кажется тут проблема с min force, надо выставить его измеренное значение @Basma4 Неочень аргументы, основанные на авторитете людей) как только начинают идти сигналы PWM - vcc,r_en и l_en себя запитывают сами от bts так же эффект тугости руля при force=0 очень сильно зависит от харектеристик самого мотора... ибо закороченный слабый и быстроходный мотор крутить легко, а мощный "тихоход" - нет так же в новой EMC (которая на STM32) питание мостов (R_EN, L_EN) отключается (не зря оно там отделено от VCC на схеме подключения) в отличие от MMOS и да, и force spring и прочие эффекты у меня работают с отключенным питанием адекватно вот лут график у меня такой получился + так же заметил, что разые BTS ведут себя по разному, в частиности я поменял первую пару bts GAG523 на точно такую же вторую пару bts GAG523 на первой паре min force был намерян 8,5%, а на второй 11,0% (остальные комноненты не менялись) в работе разницы нет - приложенный график со второй парой и выствленным min force в 11%
-
@FSUP я так же пользусь обесточными мостами в простое ИМХО, по поводу реалистичности топить не надо, в тру авто фитбэк чувствуется не руками, а тут "подделка" поэтому надо добиться максимальной "чистоты" и убрать насколько это возможно весь фон с руля, и как говорил товарищь Исаак руль должен свободно вращаться без ффб а не тормозиться и останавливаться P.S.: я за то, чтобы руками на баранке чувстовавать только лишь FFB именно в том значении, в котором она передается игрой, и если там в режиме полета/отрыва колес например сила равна нулю - то я хотел бы чувствовать полный ноль сопротивления вращению (насколько это возможно), а не получать динамическое противодействие вращению по квадратичной зависимости от скорости тем самым можно убрать максимально убрать лишний "фон" и увеличить "качество" фитбэка условным соотношением сигнал/шум max сила/min сила
-
@Tim_99 привет! можешь снять видео поведения руля? а то не совсем понятно что именно не так 1. провести тесты FFB в утилите wheelcheck 2. "подрифтить" например в LFS/корсе1 чтобы видно было как вращается руль под FFB WheelCheck.exe
-
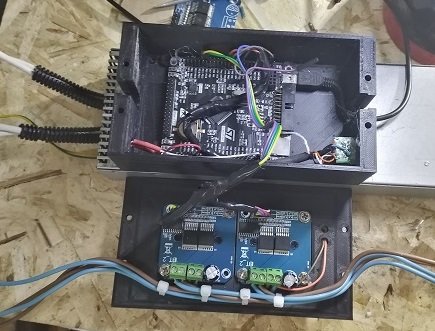
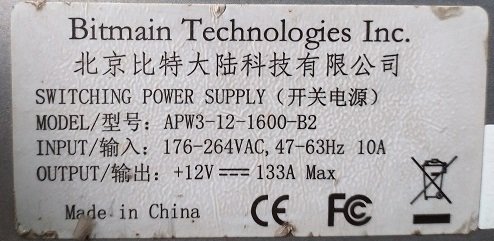
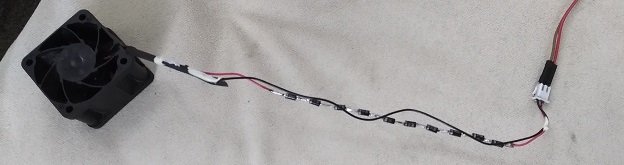
Всем привет, решил я создать отдельную тему под свой проект, перед началом я бы хотел выразить благодарность за технические консультации следующим пользователям портала: @Caravangoes @DarkGracius ну что, погнали! :) в поисках б/у коллекторного мотора постоянного тока типа MY1020 ну и "подобных", совершенно случайно наткнулся на Болгарский двигатель PIK-12 3/10-1 в состоянии почти нового, и после консультаций с @DarkGracius и изучении его темы на подобном моторе https://forum.simracing.su/topic/3830-narodnyy-directdrive-na-motorah-postoyannogo-toka/ был начат свой проект со своим видением прекрасного :) задняя крышка была просверлена для установки корпуса/держателя энкодера (omron 600 ppr) вал просверлен сверлом на 5мм, нарезана резьба м6, вкручена шпилька для соединения с муфтой энкодера, корпус/держатель энкодера напечатан на 3д принтере заменил штатные провода на мотор (использовал кабель КГхл 2х4мм) для крпеления мотора в гараже был найден "маленький" уголок 75х75х6 мм выпелен, просверлен и покрашен на вал мотора установлена 3д печатная быстросъемная муфта быстросъемная муфта представляет из себя разрезанное шлицевое соединение, сжимаемое зажимом-эксцентриком ну и для "+15 лошадей" мотор был обтянут пленкой под карбон на этот "настольная" часть была закончена от мотора идет жгут проводов (силовой кабель на мотор и экранированый кабель на энкодер) к блоку управления блок управления собран на МК STM32 и 2х BTS 7960 //тут меня сейчас закидают какашками, но я не подключал скрутку VCC+R_EN+L_EN к +5В - это дало эффект, что когда FFB=0 руль "абсолютно висит в воздухе" и вращается свободно без сопротивления, если же подать постоянное питание на эту скрутку, то обмотки мотора закорачиваются Н-мостами и не дают ему так свободно вращаться - еще раз повторюсь разница есть когда отсутвует выходный сигнал FFB// корпус блока так же напечатан на 3д принтере ] мощный блок питания был куплен у товарищей майнеров тока у него конечно с запасом... он сильно шумел вентилятором, и на скорую руку было сделано колхозное решение для уменьшения шума вентилятора, путем уменьшения его напряжения с 12 до 4 Вольт (сильно не смеяться) ] над коробкой с STM32 и BTS установил вентилятор чтобы вентилятор не работал постоянно, между ребер BTS вставил термостат KSD9700 с включением на 50 градусах ну и эта коробка установлена верхом на блоке питания спереди на коробке "clipping led" сзади разъем RJ45 для подключения энкодера и USB шнурок для подключения к ПК следом за коробкой поставил розетку РС-102 для подключения кабеля на мотор ну вроде пока все... если что забыл - спрашивайте замеры максимального момента (софт лок) дали усилие 10кг на рычаге 81мм (8,1 НМ) графики степ теста c баранкой (китай 320мм) и без: /руль после выключения FFB не останавливается т.к. как я говорил выше - мосты отключатся и он болтается несколько раз между софт локами/ график линейности усилия продолжение следует)
- 733 ответа
-
- 10
-
-
-
- mmos
- direct drive
- (и ещё 2 )
-
@dvkokh конденсаторы есть в схеме? Если не помогают, то можно поискать б/у БП от майнеров (от асиков всяких) на барахолках попадаются 12в на 130-160A за 1500-2000р