Sieben
-
Постов
1159 -
Зарегистрирован
-
Посещение
-
Победитель дней
26
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Sieben
-
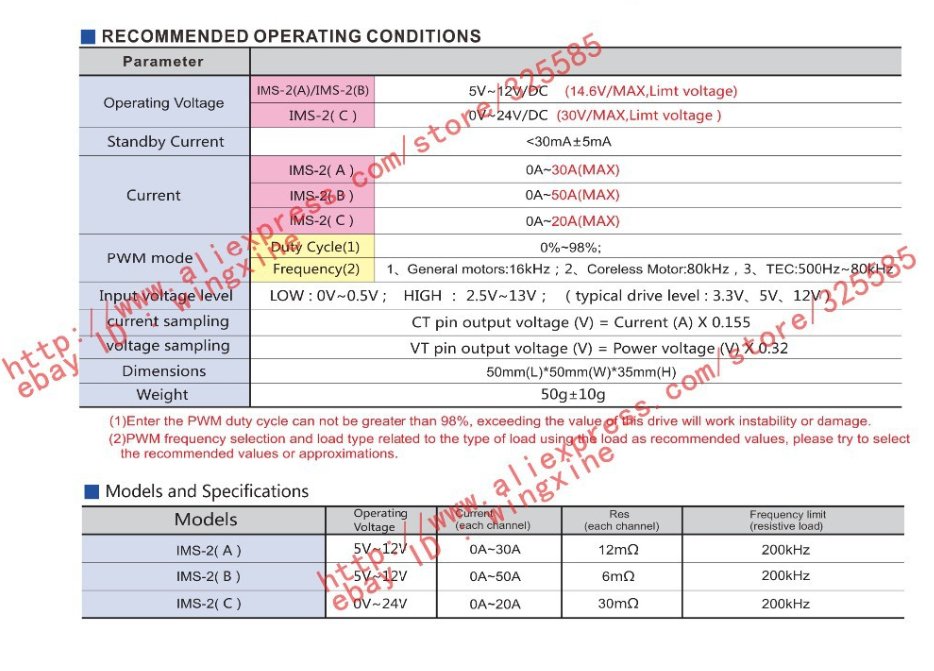
 Сразу бы и сказал, что не bts. Но только таки лучше "B". Лимит 14.8V в любом случаи, и 50A.Max. "A" - 30Amax. "C" - 30Vmax, 20A Max. https://ru.aliexpress.com/item/717470191.html Плюс B должен нагреваться меньше, из за меньшего сопротивления на канал. Это кажется этот показатель там.
Сразу бы и сказал, что не bts. Но только таки лучше "B". Лимит 14.8V в любом случаи, и 50A.Max. "A" - 30Amax. "C" - 30Vmax, 20A Max. https://ru.aliexpress.com/item/717470191.html Плюс B должен нагреваться меньше, из за меньшего сопротивления на канал. Это кажется этот показатель там.
-
Syava, а где нашёл с "A" и "C" индексом?. Не datasheet, ни чё по ним, не откопалось. Та и интересно, на сколько это всё, коррект. Есть разные номерные индексы. Те же , BTS7960 GAG523 и BTN7960 GAB617. и другие. Или вообще со счёсанной маркировкой. Та и, должны быть они все, не только на 12v рассчитаны.
-
https://www.drivingitalia.net/index.php?/forums/topic/76596-volante-direct-drive-con-arduino-stm32/page/11/#comments Там если надо, могу процитировать автора по теме. Он очень доволен. Далеко не t300, t500 csl. )
-
Вот как Михалыч. Короче точно. Понял почему драйвер diy, действительно, качал сильнее. При 4khz pwm, увеличивается мощь. (Из за разной длины последовательности импульсов между 4khz, и 20khz.) Напомнили итальянцы по теме DD на скутерах. I think I understood how to pull more power out of the sw. The old motor also held the 20khz, but I saw (trying with the my1020), that lowering to 8 or 4 khz, the power increases a lot (it would be long to explain but it is because the duty widens)
-
Видимо они правда, не правильные бтс с этой маркировкой.
-
Нииииштяяяк! Можно ещё совет всем. Провод от БП до драйвера в идеале должен быть скрученный между собой по всей длине, и при этом быть как можно короче до драйвера. Убирается лишний раз индуктивность, которая даёт всплески напряжения в драйвер тоже. База класс! DarkGracius, кажется ещё не упомянул, что лог теста это 300 ms. Верно же?)
-
Информация, лишней не бывает) По настройке cpr в mmos и не только, кое-какие моменты походу есть. https://forum.studio-397.com/index.php?threads/oscillation-issue-with-osw-and-rf2.55665/ Похоже, что ваш ppr равен 10000 на вкладке granity machine. У вас энкодер 10000 в mige, если 10000 правильно? и ваш кодировщик mmos cpr установлен на 20000, ЭТО ДОЛЖНО БЫТЬ УСТАНОВЛЕНО на 40000 ........ ... т. е. всегда умножьте свой ppr на 4, чтобы получить правильный cpr .... иначе это БУДЕТ вызывать проблемы с колебаниями ... Зайдите в настройки устройства mmos, измените настройку cpr вашего энкодера на 40000, затем нажмите SAVE, появится другое окно, нажмите ПОВТОРЯЮ НАЖМИТЕ НЕТ, затем нажмите отмену ....... затем перейдите к mmos ffb 2014, теперь под конфигурацией, в нижнем правом углу, слева в поле нажмите там, выберите «по умолчанию», затем нажмите «сохранить», затем нажмите в левом поле, снова выберите «eprom» и «сохранить», и все готово ... я заметил, что в mmosffb у вас нет сохраненного центра управления ... поставьте колесо прямо и отметьте маленький кружок, чтобы сохранить центр ...... также, когда вы запускаете любую игру, которая использует mmos, и колесо выполнило калибровку ... поверните колесо на 90 градусов влево и вправо, чтобы оно работало правильно ...
-
Спокойствие плиз) какой номер на чипах? Тот что работает который. При жёстких экспериментах, контроллер может подравливать в виде вкл выкл, но не твой случай, либо с одного из пинов выдавать полный сигнал. Убирается вкл контроллера. Проверяется тестером минус на минус контроллера, плюс на пин. Если там 3.3v то это оно. Но это редко и при жёстких не правильных экспериментах) Если один из чипов бтс перегорел, вполне может дать такой эффект тоже. И вообще при этом коротить сам контроллер.
-
А говоришь, какая там механика))
-
Боюсь с механикой придётся поработать по любому) Родного выхода вала с обратной стороны мотора нет. ) Но есть такие решения тоже. )
-
-
Показывай обязательно.
-
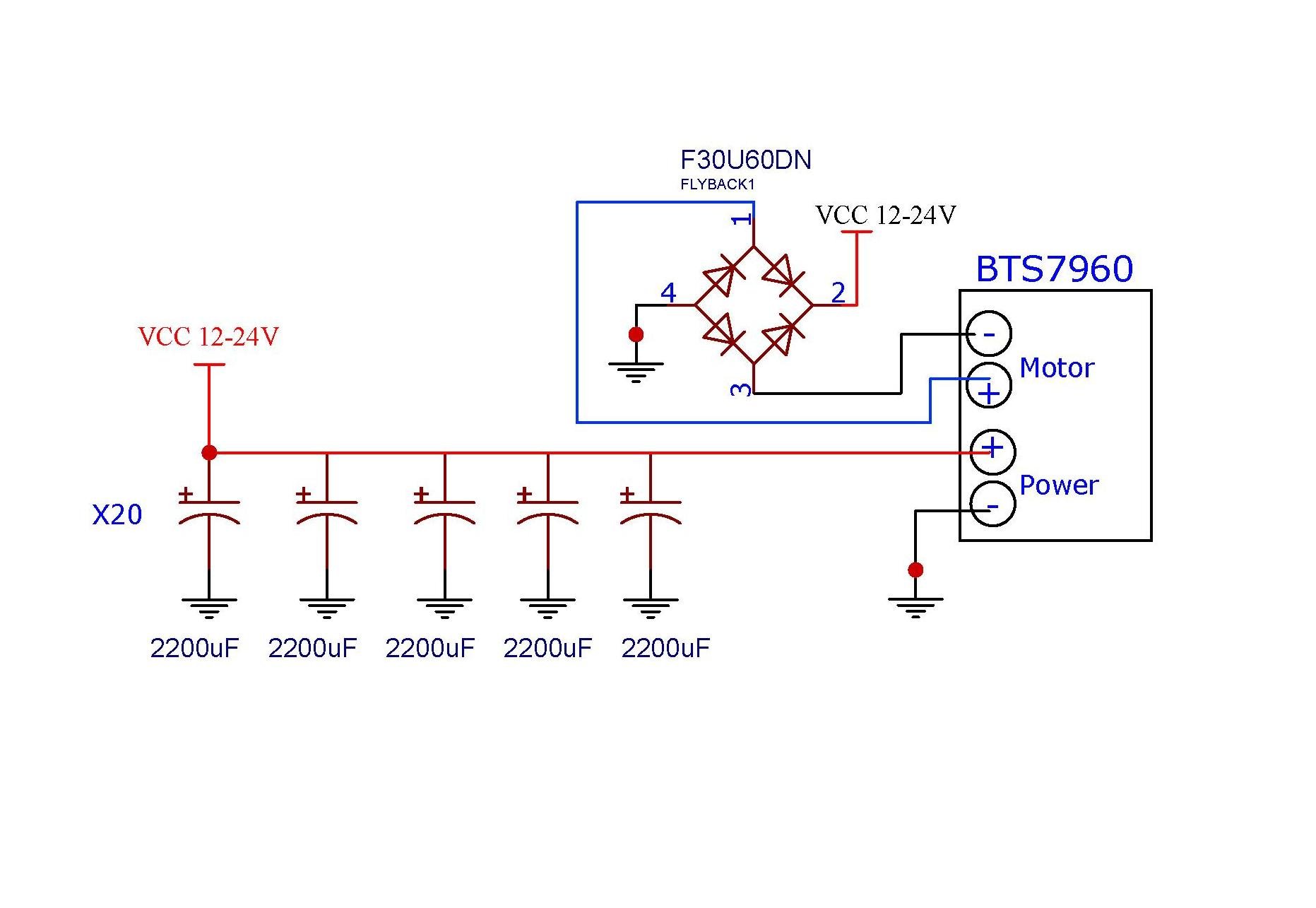
Схема подключения БТС.
-
Любезно предоставлю схему, выше сказанного. ) Диоды главное - ultrafast recovery diode. Так же набираются в параллель.
-
Не почти, а отдельным. ) Нормальные игры поддерживают кучу отдельных контроллеров. Есть такие что нет, которые слеганца древние. Поэтому это единственный минус, такого решения. Скачай ещё dxtweak2. Можно без настроек, диапазона осей и без этого, но удобно. В EMC, тоже это удобно продуманно. Под осью будет SET MIN/SET MAX диапазона. Всем, ещё настоятельно рекомендую, добавить в схему подключения параллельно по питанию конденсаторы, руководствуясь значением "ripple current". На примере кондёров фирмы Samwha, серия RD. samwha_rd.pdf Или Panasonic electrolytic capacitors datasheet Panasonic FC-A Caps.pdf т.е. в зависимости от вольтажа конденсатора, 50/60v и номинала ёмкости, набрать параллельно соединённый банкой, в общей сумме по RP значению, чем больше в итоге, тем лучше) Т.е. Panasonic 270uF - 1200ma - x20шт конденсаторов = 24 Ампера. итд. Значения могут быть и больше. И Flyback диоды бы тоже хорошо. И не просто хорошо, а очень бы хорошо) И плюс активное охлаждение BTS )
-
https://www.youtube.com/channel/UCe6N3hxeEd2DB_undoxaIMQ https://www.youtube.com/channel/UCrMH3yP67hjNvRbSHURawOA EMC09 https://drive.google.com/file/d/1F6UhFhHaGYqgZzgr4B8vnaVw6vmGyaZ3/view?usp=sharing stank, Проверь надёжность соединения проводов.
-
stank, некоторые ставят педали отдельно на ардуине с emc прошивкой.
-
BTS7960
-
Выпилив непосредтвенно реле из драйвера, и заменяя его мостовой схемой на транзюках, возник вполне резонный вопрос, почему собственно бы не дать шанс одному БТС7960, вместе в команде с диодами холостого хода, и конденсаторами. ) Фото драйвера с реле. В качестве небольшого резюме, опыта по использованию релешки. Вот честно говоря, не знаю, какую оценку дать , потому что заменив на БТС, и выкрутив FFB на 100% Gain, Constant и фичу в виде Scale до x2.5 раз Constant в EMC09, получилось почти, такие же коллебания руля в ценре, как и с реле, но на гораздо низких значениях FFB, когда была релюха. Для BTS оставил всё в сотке и снизил Scale x1.5 Constant. Если x2.5, чипы слеганца сильнее нагреваются, поэтому выставленно пока в более "осторожных" режимах, всё это дело. (Scale x1.5 Constant.) Опять же повторюсь, что с "реле драйвером" качало гораздо сильнее на гораздо более низких значениях силы. Момента переключения, по смене направления вращения, тоже не заметны, с релешкой, как может показаться. Тоже самое в центре. Но короче, если бы не "осциляции" по центру, как следсвие вынужденное уменьшение силы ffb, для её устранения, получился абсолютно адекватный и мощный играбельный драйвер. Если это конечно вообще его проблема, т.е. смотри абзац выше. Можно конечно соеденить его с мостовой схемой, из начала экспериментов, мда и посмотреть что получится. ) Может быть пойдёт даже первый вариант diy драйвера, но уже c правильной обвязкой по части диодов, и кондёров. Даже может быть получится забить на необходимость deadtime-ов для моста. БТС7960. Как было озвученно ранее, номера чипов в этом бтс, вроде как из правильной серии. (617) Линейность базы с рулём 1.4 кг. Вот эта криптоватось кривой, кажется ещё благодаря тому, что используется не MMOS а EMC. Arduino не STM32. Предположительно. Так как, в сравнительном тесте было достаточно одного запуска, и получается ровная кривая линейности , в MMOS, c EMC видимо есть свои небольшие мультики, на этот счёт. Но напомню, что она была ровной, при экспериментах с diy драйвером первой версии и c EMC09) Так же всё в сотке для теста. Для релешного драйвера, значени были подскручены) BTS7960. Видос контрруления, сейвов, итд. особенно в предпоследних поворотах. Заезд на релюхе)
-
На стм писать код куда "интересней".... Этого можно было бы и не делать... )
-
Вот. 4khz.) https://www.drivingitalia.net/index.php?/forums/topic/76596-volante-direct-drive-con-arduino-stm32/page/154/#comments
-
Забудь про эти гармоники ШИМ, если о них вообще есть смысл говорить, и если они вообще там присутствуют. ) Нету там никаких писков.) Dd в тесте, 8khz скорей всего. На 20+ khz с бтс, движок может пискнуть, еле слышно кратковременно и редко, при некоторых режимах работы, и когда нагреется. Но это не о чём совершенно. На 4khz diy наоборот, при повороте на большой градус руля например, звук пропадает. Это если интересно. Гораздо больше интересен вопрос необходимости гальванической развязки контроллера и драйвера, по части, сигнальных проводов. Потому что, у них общие земли, и наблюдались раскрутки руля не в тему, с бтс, при вылетах с трека в игре итд. Тоже самое было с diy h-мостом, без оптопар. Ардуину наверно это выносило слегка. С опто развязкой, таких мультиков нет, в diy pwm+dir драйвере, даже при том что там тупо реле. ) Как бы это представляется верным объяснением. Разница кажется как раз и может быть только в по. Что тоже спорно между прогами. То что стм быстрее пердуины, тут особой роли, кажись, не играет. Есть ролик, кстати, популярно объясняли что ардуина, "задушенна," и могла бы гораздо быстрее даже стм по скорости своего процессора)
-
Syava, ты на частотах выше 16khz pwm, уже не будешь слышать этот звук. На diy драйвере тоже, никаких гармоник "не слышно" ) Далась тебе эта тема... Мотор, он "по совместительству" , как динамик. Народ делает diy pwm контроллеры для машин, ссылку я уже приводил пример, и используют частоты 20khz, без каких либо фильтров. И вряд ли там будет писк. ) А нормальные драйвера могут работать и на 2-3Mhz и выше.
-
Как то один чувак иностранец, выдал мою работу за свою, по 3d. Это было эпично, когда его раскусили и я нашёл его тему отписавшись в ней) Ну а Авито он такой, Авито.) Он уже месяц это продаёт
-
Запиши)




.png.d524fb1a57c0c52328d01ba18b673463.png)