Sieben
-
Постов
1159 -
Зарегистрирован
-
Посещение
-
Победитель дней
26
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент Sieben
-
 Тут слегка такое, дебильное видео, но как раз можно отследить скорость вращения руля, при ловле заноса.
Тут слегка такое, дебильное видео, но как раз можно отследить скорость вращения руля, при ловле заноса. -
Придумал другой переходник с базы на кардан. Ключ на 12 спилить и соединить с карданом. Базу "подключил напрямую", без "бинокля". Установил на амортизаторы. Никакого шума при работе. Элементарное крепление. То что с торцевой стороны, очень прочно держит всё это дело. Так что, по сути проект готов. Вариации на тему "с базой" на основе "бинокля", тоже озвучены. С подключением через кардан, есть как бы вопрос в плане, что он слегонца туговат. База его то потянет, но х.з. "Quick release" Можно естественно допилить эту тему, по поводу "бинокля" с выносной базой, на основе одного "бинокля-шкив". Так что, не расслабляться.
-
Ну кто-то и вернулся. Сколько людей столько мнений.
-
В профЫль.
-
База, можно сказать готова. Крепление движка, позволяет настравить натяжение цепи. Ремня если собирать со шкивами. Установки подшипников. Сварка, запресовка струбциной в "демпфер амортизатора", переходника патрона для подключения энкодера. Вал 3d, для лучшего понимания. Linear Force Test . Без руля. Картина такая же как и с ним по граффику. Только мин force 2.5% меньше. Инструменты: Ключ, 7,8,13,17 (x2), дрель, сверло 4мм, 5мм. Сварка опционально. Болты/гайки в том числе, переходные/соеденительные: M4, M5. М8, M10. Уголок усиленный 110x110x90 (x4) Пластины под основание.
-
Постараемся не быть, не правильно понятыми, но по правде если честно, не чего супер особенного. В том плане что, в целом "Нарисовать отдать в печать, на принтер/фрезер", оно как то.... В любом случае гораздо упрощает задачу. Лепи как хочешь. Но сказал бы, ты тс просто, что это проще, было б лучше. А то опять позиция в оборону. Поэтому поддерживаю zergut в этом плане, и не посрамим запил рулей ффб не из под чпу фрезеров! Раз в защиту идет такая политика. Если что В 3d тоже разбираюсь, далеко, не в плане кубик запилить, или два.... и пиромидку, так что ровно, а то приплетут сейчас тут, типо вопрос разборок по 3d.... Наоборот стараюсь уходить от того же 3d принтера даже в далеко далеких от этого проектах. И успешно) И по доступности к использованию этих ништяков тоже ровно. Больше увлекает “сборка из болтов и гаек”. Но вопрос, что бросает больший вызов в плане "Понимание того, как это должно быть сделано" , плюс легко доступности повторения, сложности закомпоновать из деталей (авто)хозмага, простоты и кол- во применяемых инструментов, остаётся всё таки интересен) Просто разные подходыы DIYить, всё нормально, но, но. В любом случаии, проект естественно хорош. Подача фото, отдельная графа, складывается впечатление, что это готовится для публикации, не только для форума. Типа какой нибудь, наподобее “популярной механики”) Или около того)
-
Переходник "know how", с базы на кардан. Добавить переходную гайку, уменьшить её внешний диаметр с 13мм до 12мм, и законектить к карданчику. Слева, типо вал базы, справа типо кардан.
-
Вариант колхоза энкодера к "биноклю". Ведомый шкив можно законектить, между рулём и биноклем на рулевой вал. Места там полно. Как альтернатива выносной базе, с карданчиком.
-
Превышение сил сигналов FFB на руль, которые он способен передать, без "залипания", т.е. не передаёт эффекты FFB в этот момент, как нужно. В IR одна из строчек где FPS итд, отображает этот параметр.
-
В виде ещё, одного p.s. Продолжительность одна: Step time - 300ms(или выбранная). "Сила пинка" разная. Ты сказал всё ту же самую, из выше изложенного тобой, только другими словами. Это другой тест. Ты его со "step test" подмешал, слегка, в этом описании опять. Если в попугаях, Linear force test: Вася пнул мячик в горку, а другой Вася отмечал куда тот долетал, пока первый тёзка, лупил каждый раз по, скатывающемуся мячу, с возрастающей силой..... Так и измеряли. Всё фэйспалм, простите за занудство, с переуточнением. И завершающая: Вопрос. I have a osw built. I'm trying to understand why the linearity test (step 2) with wheelcheck shows a bad linearity, the maximum force quickly reaches saturation. (OSW быстро достигает вершины, бла бла бла, почему плохая линейность? Ответ: Because this test does not work well with super strong wheels. Your wheel is spinning to the stop with only 10% power and after that there is no more room to measure the wheels performance. (С супер сильными рулями тест работает плохо, OSW на 10% мощности уже раскручивается до остановки, дальше измерить его характеристики, не представляется возможным.) http://members.iracing.com/jforum/posts/list/875/3260458.page#9360794 Всё. ) Как там дела с охлаждением мотора будут? Он же обычный коллекторный? Ему б принудительное охлаждение ротора, а не корпуса, при котором ротору фиолетово, что на мотор дуют воздухом, пусть даже с радиатором. Тот индонезиец с MY1016, конечно то же блин, исполнил охлаждать один лишь корпус вентилятором. Единственный чел подключил воздушный насос, на своём электро-багги, с такой же движкой, сделав дырки в корпусе, и пустив туда поток воздуха через шланг. По сути, почти единственное правильное охлаждение таких моторов.
-
Смотря как крепить и сколько раз переносить, насверлив кучу дыр) Сварка/болгарка может быть "гибче" ) Можно на креплении родном для сидухи прикрутить. Спокойно раз их поставить, и двигай себе )
-
Нормальное кресло, фигли. Главное, что бы скрипов не было конструкции. )
-
Прикрутить звёздочку BMX к шпильке на 10, с диаметром самой звезды, в месте посадки 20мм, тот ещё челлендж. Прикрутилось через торцевую 1/2 на 17мм. Торцовая хорошо центрируется и зажимается гайками. Есть там как раз отбортовка, которая прижимается к звезде идеально. Но c отбортовкой торцевые не все. Фирмы Jonnesway по крайне мере с ней. Можно взять шпильку и двадцатку, но это гораздо большие подшипники. Но дело не в них, а в креплении. Те что в работе подходят хорошо под соединительные пластины. Спасибо почте России, которая доблестно пропарила, заказ с таким делом. Прикидка. Пока от велбосной передачи 1:4 решено не отказываться. В связи с "спасибо почта России". Дабы подстраховаться от "Ждите ответа...." и с ременной передачей.

-
Направление обратно, это сигнал на возвращение обратно в центр колеса. Для следующего цикла, для посыла нового с более усиленным импульсом. Не более. Исходя из описания. This test centers your wheel, and then plays a force back for a certain amount of time and records how much movement there is at that strength, if any. It centers it again, and goes a step up in strength, and repeats this until the test finishes. It should look similar to this as it runs.
-
Если в виде быстрого ответа, то по крайне мере, про измерение куда укатилось колесо по инерции, и задаваемый угол не было. Почему? Ведь меряют силу а не график положение руля (точность позиционирования) выясняют. Плюс оба метода не состоятельны. С весами и раскруткой для измерения линейности силы. Текст почему был в ссылке в скрытом тексте выше.
-
P.S. Так это же и есть значение по - min force. ) Механика не причём. ) Эти сигналы силы FFB и будут от этого показателя начинаться ) Про инерцию тоже представляется, что для ffb вряд-ли кто то будет брать движок с судовых азиподов, поэтому, провернуть рулём, то что обычно используется, ну как бы, должно быть под силу)
-
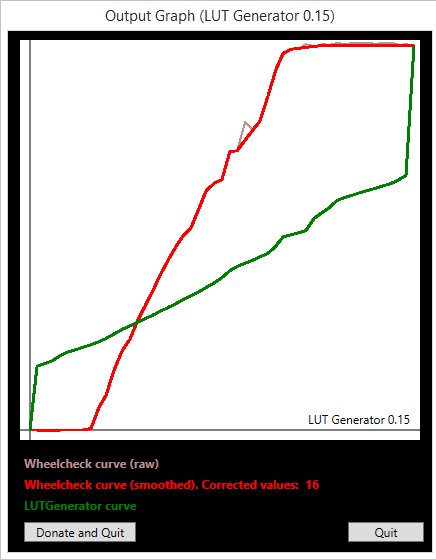
И всё таки поправочка: This test centers your wheel, and then plays a force back for a certain amount of time and records how much movement there is at that strength, if any. It centers it again, and goes a step up in strength, and repeats this until the test finishes. The lut generator is guestimating the torque by measuring how much the wheel moves, since there is no torque sensor on the wheel, that is the only way to go.... https://www.isrtv.com/forums/topic/8286-fanatec-review/#comment-75034 Речи про заданный угол и его проверку, включая инерцию, в этом тесте нет ) Энкодером проверяется на сколько колесо покрутилось, при заданном импульсе разной силы по времени. Тем самым и меряют силу. Так как нет самого датчика измерения момента. Там на оф описании, пример с чуваком который придерживал руль в максимальных стадиях проверки силы, боялся что он ему раскрошит мех.стопари при этом. Но этого можно было не делать. Результат теста, компенсирует отсутствие отклика в начале графика с мин силой, и скидывает макс значение вверху кривой. Тем самым ровняет линейность силы. Поэтому и отмечается уменьшение, силы С и без lut в целом, оттого как былО, по дефолту, и лучшее чувство в центральном положении руля. Это ближе к истине) Аналогия lin force test, это своего рода min force. Для моего DIY это 16%. Но и руль весит 1,5 кг. Если его снять, то наверно отклик будет раньше, если это играет роль, плюс движок по вольтажу не в номинале.
-
Да это понятно. Там, кто что, тоже говорит. Кто то с лут, кто то его снёс вернулся на настройки "как есть". Ну или около того. Каждый выбирает, то что лучше работает для него самого. У тебя какой руль, в плане баранки, сам планируется для установки?
-
В теме человека с хитрым ником "Caravangoes", что либо отмечать опасно, и отметившиеся в теме, попадают с таким подходом, под остальную часть, первую, поговорки.... Я бы кстати добавил бы "Caravangoes"on". Было б "на стиле") Шютк. Та и уже наверно всё сделал, только не говорит) Такая идея Интересный пост про все эти lut и тому прочее. Как и сама тема. ) https://www.assettocorsa.net/forum/index.php?threads/using-wheelcheck-linear-force-tests-may-be-based-on-seriously-flawed-assumptions.35286/page-4
-
"Мастер сарказма". всё тут ровно. По ссылке выше статья называется как: Using WheelCheck linear force tests may be based on seriously flawed assumptions... Использование испытания на линейную силу WheelCheck может быть основано на ошибочных предположениях ...
-
Я не выгораживаю свою стройку. Okay? P.S. не оно? включая комменты. https://www.racedepartment.com/threads/using-wheelcheck-linear-force-tests-may-be-based-on-seriously-flawed-assumptions.124937/ Надо будет почитать, отдельно про школьный эксперимент, который, якобы то же самое, что и идеальная настройка руля. Вопрос. если график уже, из лут моего примера, по сравнению с более округлённым из того видео. Как правильно это интерпретировать по характеристикам руля? А тот серво оказывается гораздо больше, чем казался по первому скрину) Кстати смотрю моторы в авто компрессорах для шин, нормальных.... сгодятся интересно, для этих дел.
-
Отдалённо похоже что кто-то, пытается изобрести велосипед. ) Вот чес слово. С чего вдруг там "заведи с толкача БЕЛАЗ", крутануть тот же мотор скутера например. Та абсолютно..... Спокойно он вращается. Может дело в цепи в моём DIY. А везде в основном ремень. Может это фактор. ) Хотя вряд ли.
-
Okay, okay. С lut смысл? Он же индивидуальный походу. Может просто для инфы по lut, кому либо. Чел приверженец увесистого руля тут. Ну если например интересно, то файл с моего DIY. ) https://drive.google.com/file/d/1ZjF9YavhT55YHmnSFMpMLgRYIelxehpz/view?usp=sharing Этого просто добиваются со "Spring" в минимум, Не? В корсе нормально абсолютно чувствуется скольжение.)
-
http://parkermotion.com/dmxreadyv2/faqsmanager/faqsmanager.asp?question=1514 Continuous rated torque Непрерывный номинальный крутящий момент - это непрерывный крутящий момент двигателя, который он может выдавать при номинальной скорости, близкой к максимальной скорости двигателя. Это лучший показатель производительности двигателя, так как это крутящий момент двигателя на скорости. Continuous stall torque Непрерывный крутящий момент - это постоянный крутящий момент двигателя при нулевых скоростях (при остановке). Это крутящий момент заблокированного якоря. Производители проверяют это, блокируя якорь, а затем отслеживая температуру двигателя. Как ток подается в двигатель.Большинство производителей, если они указывают непрерывный крутящий момент и не уточняют, находится ли он в блокировке якорь или при вращении, то обычно это значение при блокировке. Номинальный крутящий момент учитывает крутящие (магнитные) потери и тепловые (I2T) потери двигателя.При скорости 0 эти потери равны 0, и, следовательно, крутящий момент при останове превышает номинальный крутящий момент. Исходя из ИМХО BS Sim, и небольших подсчётов. Он юзает FFB 50% так как сотка через чур слишком сильно. Используя даже половину мощи по питанию, качает хорошо. С его слов, малым моторам для такого же момента, нужно передаточное от 1:16 для такой же силы FFB. Ему Нравится момент и обороты при передаточном - 1:4 (это до перехода на 1:6) Сейчас наверно ещё больше. Если кажется, что манс с малым мотором решается большим передаточным, то только при этом теряются обороты, у меньших моторов. MY1016 при 1:4 - взяв по среднему, его честные 0,9nm - получается 3.6n.m. Он перешел потом на 1:6, а это 5.4nm. при 450rpm. Будем отталкиваться от рекомендованного минимума по оборотам, для руля: 300rpm Смотрим. 42ZTY04B 4700rpm и stall torque 0.5nm. 1/4 - 1566rpm 0.5nm x 4 = 2nm 1/6 - 783rpm 0.5nm x 6 = 3nm Тут всё выглядит нормально. Servo DC motor. он от Nm-0.184 до 0.353, по похожей картинке, похожего сервомотора, по rating torque. Для расчёта возьмём тот же 0.5nm. Так и быть. 770ой мотор например 0.6nm. Но у него нормальные обороты. Servo DC motor - 940 rpm.это его No-load rate speed. Если например по аналогии со скутерным, его 3400rpm No-load rate speed, и 2750rpm rated отличатся в % 80.88% ( и по 42ZTY04B выше примером, по спецификации это значение 79,66%) то скинем и ему до 80% от 940rpm, по оборотам по нагрузке. Выходит 752RPM. Более правильный расчёт по rate speed. 752RPM. 72t12t = 1/6 - 125rpm - 3nm 72t20t = 1/3.6 - 201rpm - 1.8nm 72t24t = 1/3 - 241rpm - 1.5nm 96t12t = 1/8 90- rpm - 4nm 96t15t = 1/6.4 113- rpm 96t20t = 1/4.8 151- rpm 96t22t = 1/4.4 164- rpm 96t24t = 1/4 181- rpm - 2nm Т.е. Просадка по оборотам, по любому. Этот конфиг более-менее. 72t24t = 1/3 - 241rpm - 1.5nm Но. MY 1016 2750rpm 0/9nm. А в целом - (0.70 - 1.22n.m) https://www.motiondynamics.com.au/united-my1016-350w-24v-dc-motor-with-11-tooth-chain-sprocket.html (При 0.9nm) 1/4 - 687rpm 3.6nm 1/6 - 458rpm 5.4nm (при 1.22n.m) 1/4 - 687rpm 4.88nm 1/6 - 458rpm 7.2nm Далее докопаемся до рекомендованного минимума, оборотов в секунду. 300/ 60 - 5 об/сек. Servo DC motor - 241/60 - 4 об/сек. Это по его лучшей скорости. Один оборот в минус, в об./секунду от рекомендации. Теперь MY 1016 1/4 - 687rpm / 60 = 11 об/сек 1/6 - 458rpm / 60 = 7.6 об/сек т.е по оборотам DC Servo в 1.73, почти в два раза, медленнее скутера. И в два с половиной раза медленне при 1:4. Много ли мало ли, типа это ничё не решает, можно глянуть это видео. При этом G25 моторчик должен быть пооборотестей от выбора ТС. T500 крутится быстрей. А это естественно приятней. Тем более, если заявлен уход и переход на другой уровень от G25. В итоге вырисоывается противопложное. _______________ Говоря про Nm, на примере Sim Cube DD 30nm 20% FFB - чел окончательно сдался при - 6nm. Либо начало теста с 21:50. 1% - не о чём. 2.8% - 0,8 nm - по силе логитек, вполне можно быть довольным таким FFB. 6% - 1,8nm уже перевалил Фанатэк, и любого Траста T, TGT, TSP. Уже более чем достаточно для обычных гонок. (по силе похоже на его Datsun 240z по городу.) 9% - 2.7nm - уже надо почти корпусом наваливать на руль. (Жига, ты ли это? ))) 12% -3.6nm - уже многовато. При этом силу FFB Sim Cube DD приравнивают к точости и скорости передачи FFB, а не качалку бицухи?) Хотя и она тоже включена: «For whom this wheel is for? "for the professional guy training"(C) Да это DD но в целом то всё к этому и идёт. Кажется или правда не сходится, про прозрачность руля и силу FFB) Так что, "Cкутеру" компромисс не нужен) Сравнивать, всё таки, выбор ТС и скутер, будет не гуманно. ) Плюс для сравнения, можно глянуть всё того же BS Sim, скорость вращения. Либо этот тест только в 2 раза в ускоренном, т.к. в всем известной тестовой проге, WheelCheck, была снижена скорость в два раза. И при всего - 12V12,5A. При этом это обычная баранка, по весу, не для установки для компов. Гы)