propeler
-
Постов
171 -
Зарегистрирован
-
Посещение
-
Победитель дней
51
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент propeler
-
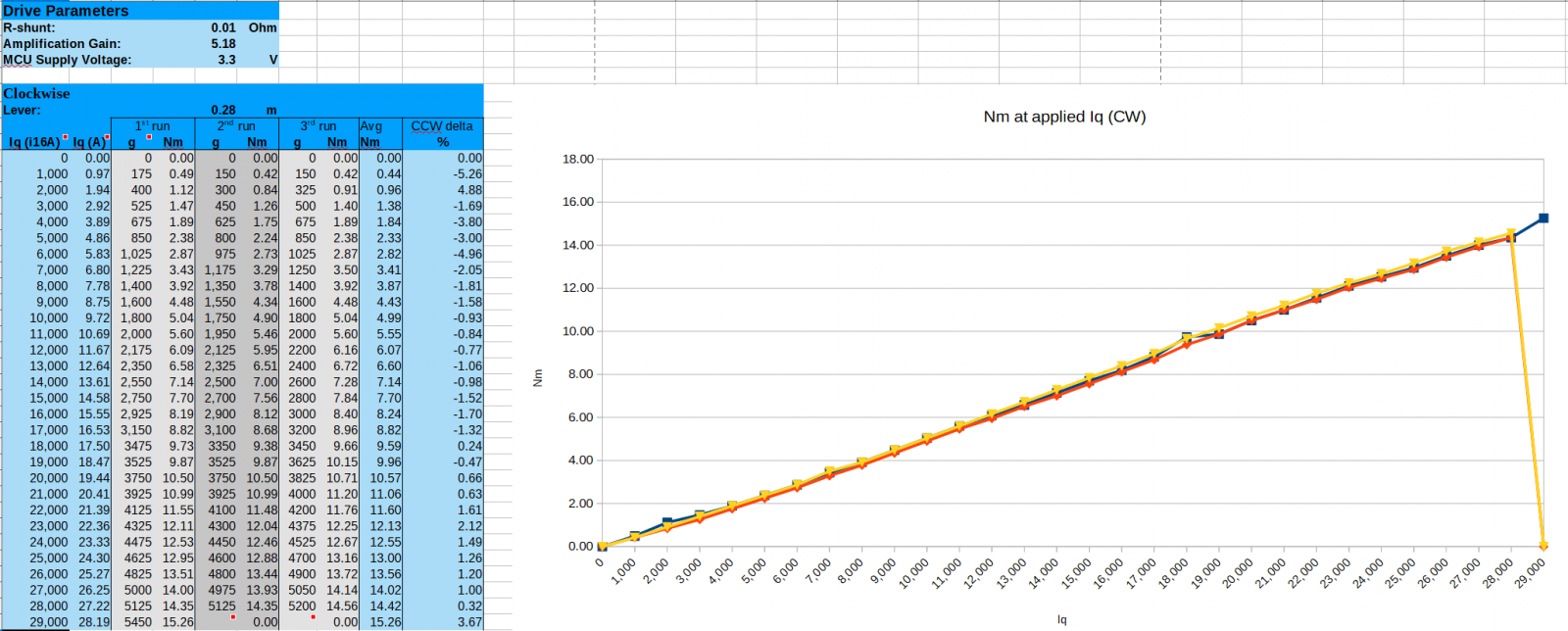
Я же выкладывал график усилий по мотору. И писал результат измерений лично. 1.6 кг на рычаге 50см на 50% с источником питания 19вольт.

-
А как у тебя радиаторы стоят?
-
Поставь в АЦЦ FFB частоту 222, не знаю почему но на 333 то же самое. Если кто-то понимает почему так может быть - пишите. Но на 222 и 111 работает без проблем Реализуемо. Добавлю. Просто никогда до полных оборотов недокручивал и не думал об этом Я буквально на днях померил свой, на 50% торк гейн выдает 7.1 Nm на 19 вольтовом БП.
-
github.com
-
Благодаря товарищу @Koler была выевлена некоректно работающая последовательность калибровки. Пофикшено и обновлено https://github.com/o-devices/bldc-ffb-wheel-firmware/releases/tag/v1.0.1 Корректно отрабатывающая последовательность выглядит так Калибровка позволяет компенсировать не соосность в установке магнита и нелинейность в определении угла поворота.
-
Мотор конечно забавный, я таких не видел)
-
На вскидку можно VESC. Надо в CubeIDE в файле ioc перепроверить/поменять ноги для SPI драйвера и энкодера. Перегенерить код. Перепроверить по коду что все там где надо. Но у меня прям сейчас нету времени этим заняться.
-
https://habr.com/ru/company/ruvds/blog/536760/
-
Не спеши ODrive хоронить. Может можно еще оживить. У меня такое было, full erase чипа через STM32CubeProgrammer в DFU режиме оживил.
-
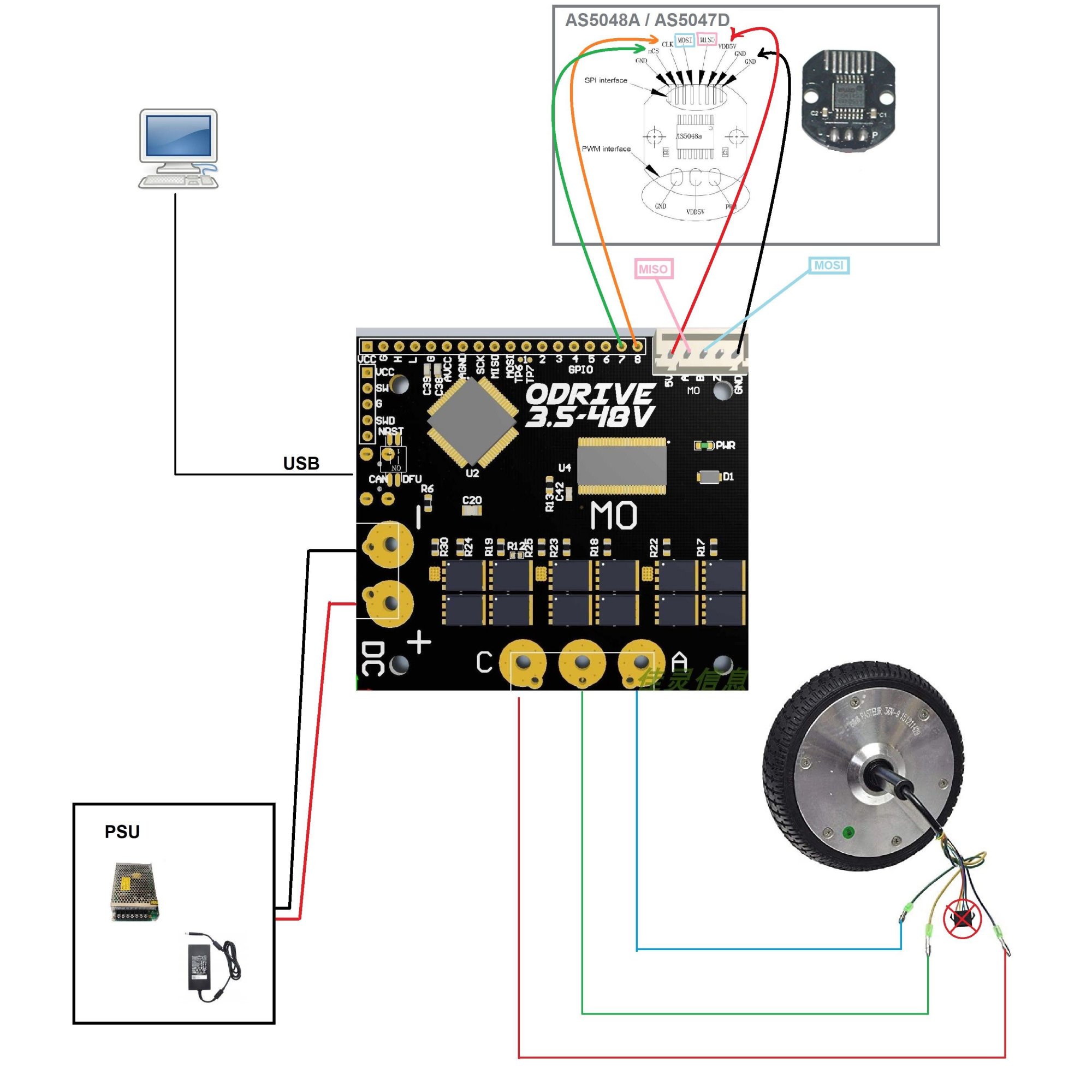
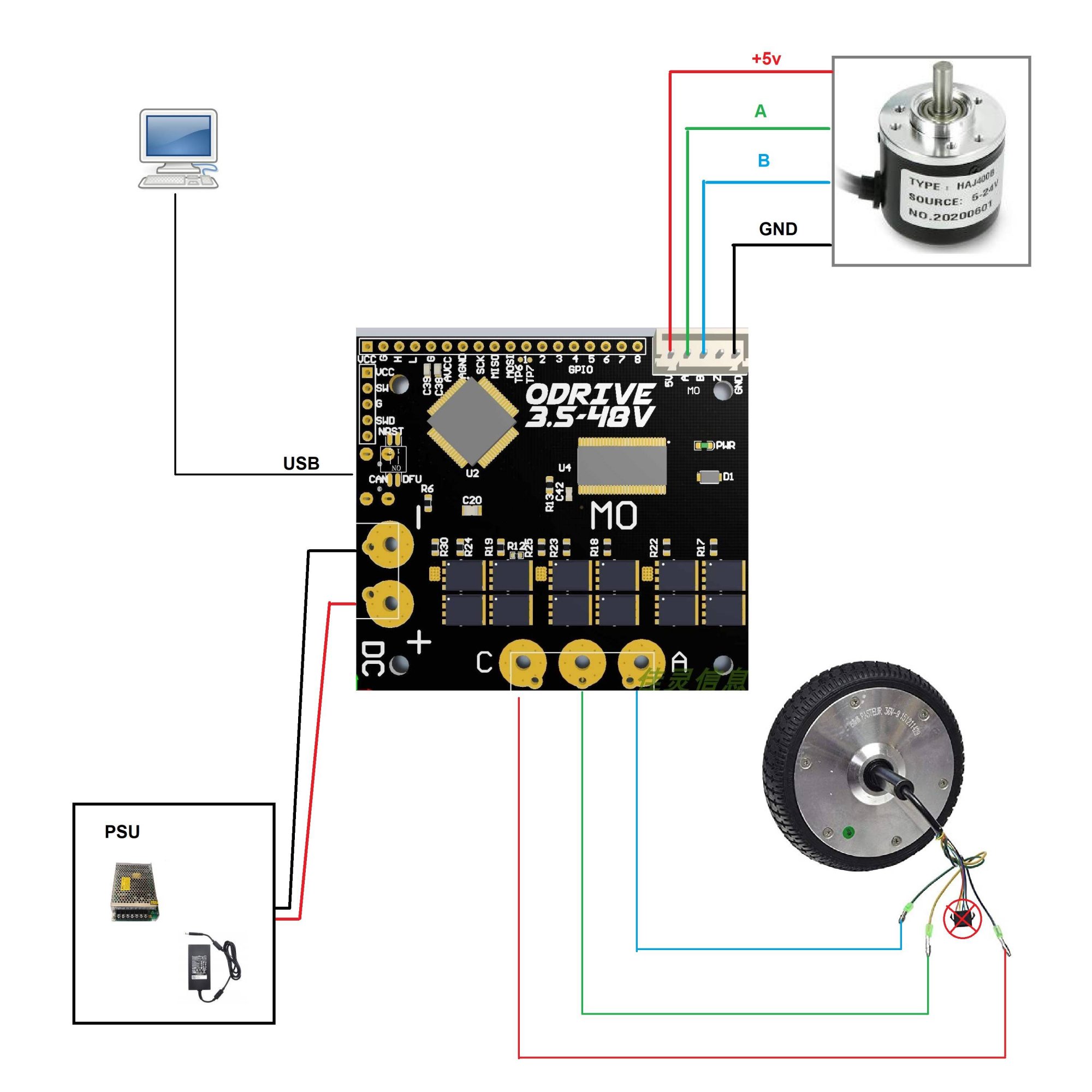
У тебя какой ODrive одноосевой или полный двухосевой? Сделай фото что ты к одрайву как подключил Я посмотрел даташит команды чтения не совпадают, для того чтобы прога читала этот энкодер надо править код. Полюса определяются прошивкой во время electrical poles calibration. Не спеши с мотором надо сначала завести энкодер В прошивке пины SPI замаплены соответственно этой картинке. Без CS энкодер не будет работать. CS необходим для работы SPI. Ну и протокол другой. Мотор 6.5 дюйма. БП я использую ноутбучный Green Cell PRO 19V 9.5A 180W
-
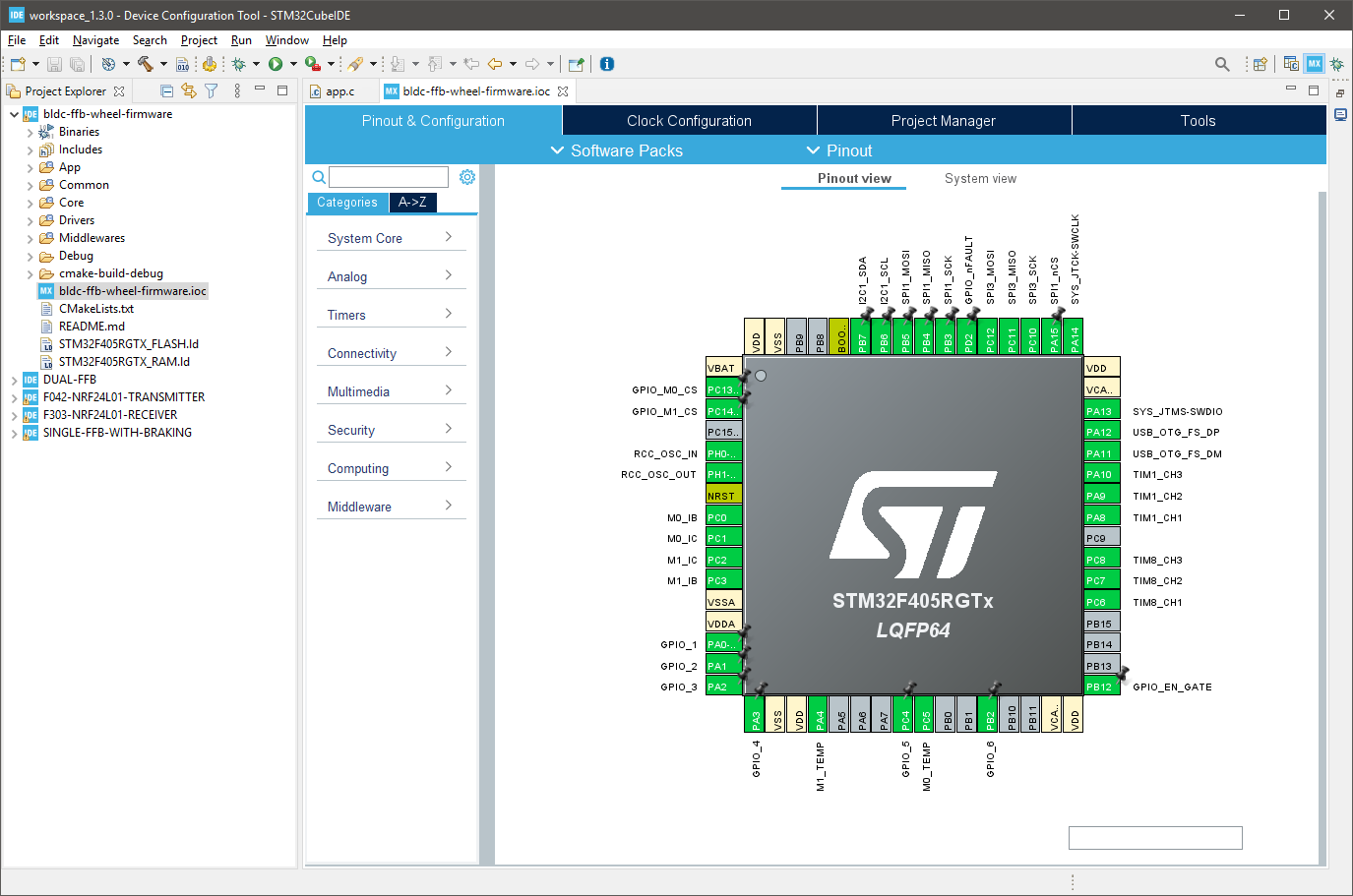
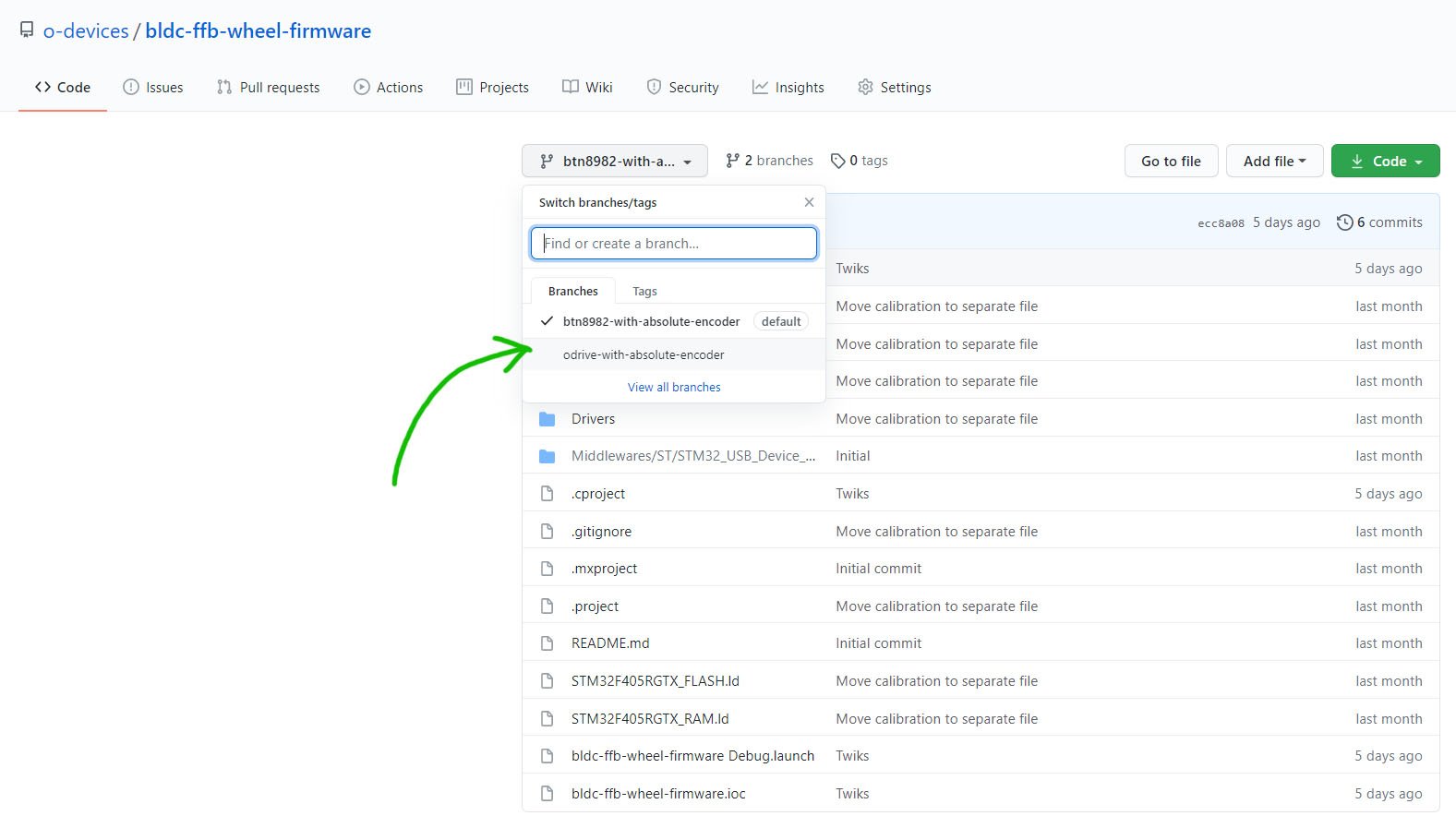
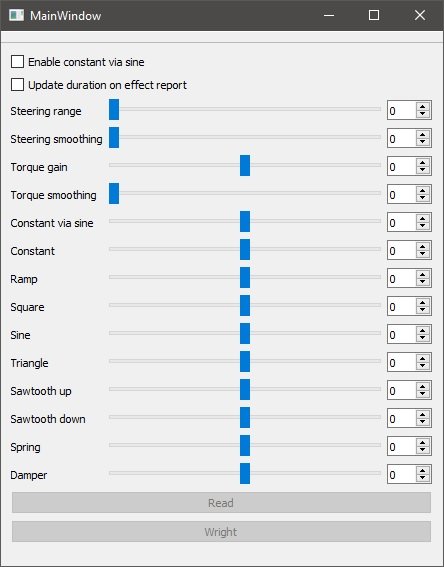
Поехали. Будем заводить кастомную плату. Первым делом подключаем USB как на рисунке. Для прошивки качаем STM32CubeProgrammer и собранную прошивку здесь https://github.com/o-devices/bldc-ffb-wheel-firmware/releases/tag/v1.0 с именем btn8982-with-absolute-encoder.hex. Прошивку можно записать двумя способами. Или через STLINK или по USB ы режиме DFU. Вариант с STLINK. 1)Подключаем одновременно STLINK и USB. Запускаем STM32CubeProgrammer. Видим такое окно. В списке (1) выибраем STLINK, жмем кнопку (2) для того чтобы обновить список подключенных устройствб и жмем (3) для подключения по STLINK. 2) В открывшемся окне жмем (4) чтобы выбрать hex прошивку, выбираем скачанную версию hex 3) Жмем download (5) и после завершения прошивки жмем disconnect (6). Перевтыкаем USB устройства чтобы перезагрузить его Для DFU процесс отличается лишь тем что перед подключением USB замыкаем перемычкой два контакта отмеченых красным на самой первой картинке, а в списке (1) выбираем USB. Все остальное аналогично. После заливки прошивки снимаем перемычку и перевтыкаем USB После заливки прошивки устройство будет отображаться в системе: Для настройки девайса используется программка. Качаем ее здесь https://github.com/o-devices/bldc-ffb-wheel-ui/releases/tag/v1.0 Запускаем. Сначала там будет какой-то рандом настроек. Ставим примерно такие: Нажимаем в обязательном порядке сначала Write to controller для записи настроек в контролер и потом Save чтобы сохранить настройки в flash и они сохранились между переподключениями. Выключаем программу, перевтыкаем USB чтобы перезагрузить контролер, запускаем программу - настройки должны сохраниться. Вся эта часть работает даже без энкодера и мотора. Следующим этапом будет подключение мотора и энкодера. P.S. Odrive то же самое. только заливаем прошивку с именем odrive-with-absolute-encoder.hex
-
Код прошивки для ODrive уже давно лежит на github нужно просто переключить ветку Git. У тебя есть ODrive и энкодер SPI? Обещаю, сделаю инструкцию. НА работе просто завал. Она уже давно там. https://github.com/o-devices/bldc-ffb-wheel-ui лежит здесь. Проект для Qt Creator. З.Ы. Если здесь есть человек который понимает во всяких C и Qt попробуйте собрать напишите вопросы чего не получается в сборке чтоб я мог отобразить в инструкции. З.Ы.Ы. @Koler как будет готова железяка напиши в личку может созвонимся в viber или telegram и в интерактивном режиме попробуем все завести
-
Мой косяк. Там ошибка в проекте. Исправляю.
-
Кубпрограменру не нужен хекс. Он умеет писать все. хоть .elf, хоть .bin. Если смог открыть проект и он сбилдился по кнопке с иконкой 'молоток' то просто найди в папке .elf файл и записывай его с помошю кубпрограммер. Инструкция в процессе.
-
Скачайте с сайта СТМ STM32CubeIDE. Он умеет скомпилировать код в форматы которые кубпрограммер умеет заливать. Постараюсь вечерком положить инструкции рядом с кодом
-
Добавилась версия для ODrive. https://github.com/o-devices/bldc-ffb-wheel-firmware Реорганизовал немного структуру и добавил вариант для ODrive с абсолютным энкодером. сейчас в репозитории две ветки. Код разделен по веткам - одна для кастом борды с абослютным, вторая для одрайв с абсолютным. Для инкрементального надо еще дописывать поддержку. На данный момент она не готова. Холы работают когда мотор крутиться с достаточной скоростью. Когда мотор стоит/движетсямедлено по холам невозможно определить позицию ротора. Нам же нужно как можно более точное положение ротора чтобы рассчитать какие значения нужно подать по фазам.
-
Да. Можно. Прошивку надо делать из версии для ODrive. Там STM32 и драйвер мосфетов аналогичный ODrive. Только на до перепроверить на какие ноги у них выводы сделаны поменять все в проекте соответственно.
-
Да. Все будет. Я добавляю частями на гитхаб все, просто собрать все скопом за один заход - надо много времени непрерывным куском, а такового нет ? Поэтому туда все заливается кусочками в выдавшиеся свободные минуты. Файлов накопилось разных типов много, все смешалось в кучу - уходит время на структуризацию и порой доделки соответственно опыту использования.
-
Для этой платы прошивка уже актуальная. Нужно просто скомпилировать и залить.
-
https://github.com/o-devices/bldc-ffb-wheel вот тут уже лежат исходники прошивки для моей версии платы. Там же будет лежать и для ODrive. Пока без описания, буду туда же копировать то что уже писал здесь и расширять документацию + там будут и исходники программы для настройки и 3Д модели. Пока выложил прошивку только для своей потому что в ней появился функционал который надо еще скопировать в прошивку для ODrive. Постараюсь сделать это как можно быстрее. Что сейчас есть в прошивке: - Поддержка абсолютного енкодера AS504X серии - Поддержка баранок от Thrustmaster (можно подключать во второй SPI разьем и все кнопки работают) - Настройка параметров к компа. В том числе калибровка центра и калибровка полюсов мотора для компенсации неточности установки енкодера. - Возможность сохранения настроек в контролере чтобы сохранялись после отключения питания. - Кой какие оптимизации, благодаря которым мотор перестал греться от слова совсем. Сейчас на 50% мотор потребляет около 4.5А. При этом мотор за 2х часовую сессию просто холодный. Можно смело использовать не боясь перегреть, но это надо быть качком чтоб крутить. Я не знаток по MMOS FFB возможно надо спросить в теме про MMOS FFB
-
Ну раз вам без детских картиночек скучно - вот схемы подключения одрайва. Не могу представить схему проще. Вариант для инкрементального энкодера: И для абсолютного SPI: На плате есть "родные" пины для SCK/MISO/MOSI но энкодер отказывается работать когда к ним подключен. Шина общая с драйвером мосфетов и MISO забивается данными с него, пока не заставил работать на общей шине с енкодером. Прошивка для SPI версии будет на днях. Я дописываю алгоритм калибровки и сохранения опций в флеш памяти. Для инкрементального нужно немного адаптировать. Я написал программу с помощью которой можно менять настройки с компа. Будет расширяться по мере добавления функционала прошивки Не будет. Видео-картинко делание забирает много времени. Я лучше потрачу это время на написание фцнкционала. Для того чтобы понимать какая сила все уже есть в теме. Есть графики мощности в зависимости от тока, есть лог из вилчека. В крайнем случае - сила мотора такая что позволяет разгонять человека стоящего на гироскутере ? Ну и еще важный момент - я не умею катать дрифт и в дерт ралли ?
-
Дичайшая мощность в нашем случае не показатель. Да, на полном токе и максимуме вольт эти моторки могут таскать RC модельки или что-0то еще - как бешеные. Но у нас с вами специфический сценарий использования. Нам нужен максимальный момент на низких оборотах. Это диктует нам на какой параметр стоит смотреть у таких моторов. Для на ГЛАВНОЕ - kV. Это показатель характеризует количество оборотов которые выдает мотор без нагрузки если на него подать 1 вольт напряжения. Почему он важен. Есть такая характеристика как Motor torque constant. К сожалению не знаю как по русски, но это константа которая определяет сколько Nm момента выдает мотор на 1А приложенного тока. Эта константа зависит напрямую от kV мотора. И рассчитывается как 60/(2*Pi*kV). Берем например мотор https://flipsky.net/products/bldc-belt-motor-6384-4000w-for-electric-skateboard. По виду нереально мощный мотор. И так и есть. Но мы эту мощность не сможем использовать. Увы. Мотор имеет 190kV Для него получим 60/(2*3.14*190) = 0.05 Nm/A. Предположим у нас есть блок питания на 20А. Тогда теоретический максимум что можно выдавить из этого мотора с таким блоком питания - 0.05*20 = 1Nm. Подобного рода моторы не подходят для директ драйв. Но их можно использовать с редукцией. Я использую подобные моторы с 60kV в своем форсфидбек джойстике с ременной передачей. Из таблички по ссылке модели 86BL115-430 и 86BL115-430 выглядят интересно. Torque constant хороша у них.
-
1) да. Одрайв, мотор, энкодер, БП. 2) можно использовать любой трёхфазный bldc мотор. Мотор от ховерборда используется исключительно из-за сочетани дешевизны и ооочень хорошего отношения момента на ток благодаря низкому kV
-
Энкодер. Можно использовать инкрементальные. Прошивка под инкрементальные энкодеры сейчас в работе. Такой как у тебя народ монтирует через ремень. Найду картинку скину. БП на 48 много. Не знаю какой одрайв вышлют китайцы, но родной одрайв на 24 вольта. Но даже не в этом дело. Такой мощный бп просто перебор. Это как купить аккустическую систему на 1000ват и включать не на минимум потому что в комнате окна вылетают ? Я бы рекомендовал взять БП от ноутбука делл DA210PE1-00 . Это БП на 19v 11A. Я пользуюсь таким китайским - его хватает прекрасно. И только если его прям вот мало будет искал бы что-то другое. Плюс такого БП что он сразу с кабелями, в коробке. Можно безопасно дожить где попало и все такое.
-
BTN - ки рассчитаны на 55А. Мотор на 75% процентах потребляет меньше 10А, с радиаторами 15x15мм как на фото платы драйвера не греются даже без принудительного обдува. По расчетам с https://www.heatsinkcalculator.com/home.html с такими радиаторами они должны держать 25А не преодолевая допустимую температуру. Так что у BTN еще хороший запас по току в данном случае. Мотор лучше с большим количеством полюсов. По моему скромному опыту у моторов с большим количеством полюсов меньше Torque Cogging. 8-10 дюймов колесо потянет. Тем более что само "железо" на них совсем немного крупнее только чем на 6.5. На ютубчике есть сравнения, магниты и статор совсем немного только больше. Ну и на 500 ватах ты его все равно не будешь использовать, это очень много - на полной мощности руки поотрывает ? Моего мотора номинал не знаю - брал его на барахолке. Внутрянка воттакая