propeler
-
Постов
171 -
Зарегистрирован
-
Посещение
-
Победитель дней
51
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент propeler
-
Сейчас на новой прошивке подключение руля не доделано. Будет в одной из след версий и схему нарисую куда подключать
-
У в серии проджект карс инывертирован constant force, выкрути Constant gain(%) в -100
-
У всех так. Ползунки выведены на все эффекты потому что разные игры выводят силу через разные эффекты. В АСС вывод эффектов через constant, есть игры которые выводят через spring, есть которые всякие вибрации выводят через sine и square но единого формата для всех нет. Попробуй добавить current reading smoothing. Алгоритм использует постоянное сравнение тока по фазам с рассчетными и адаптирует шим чтоб получать рассчетные. Поэтому если чтения тока шумные будет постоянное 'шумное' изменение шим. На прошлой прошивке там у меня и по самому усилию было сглаживание и по координатам. Сейчас таких фильтров меньше для больше 'отзывчивости' но как следствие больше нагрев. Сглаживание по току должно помочь. Поставь та 0.9 посмотри если информативность не убавилось так и оставляй. Если будет какие то паразитные запаздывания и все такое - уменьшай пока не будет компромиса между нагревом и отзывчивость.
-
Есть. Можно. Но конкретно Это другая причина. Мотор работает как генератор когда крутишь руль быстро и повышеает напряжение в цепи - БП уходит в защиту. На этот случай можно или схему сброса по той которую выкладывали выше, или тормозной резистор(но пока в прошивке нет на него сброса, но будет, просто руки за всем не успевают что надо ) В данном случае эффект пружины без демпфера. Поскольку у руля есть инерция даже при слабом цетровочном усилии он проскакивает за центр и его начинает опять центровать и так далее по кругу. Если сила инерции выше депфирующей силы - идет нарастание колебаний, если наоборот - затухание.
-
Демпинг пока не реализован. В работе.
-
В стандартном протоколе таких еффектов нет. Это какие-то типы еффектов эксклюзивные для дерт ралли. Возможно поддерживаются какими тот официальными рулями. Если кто знает больше - пишите будем разбираться
-
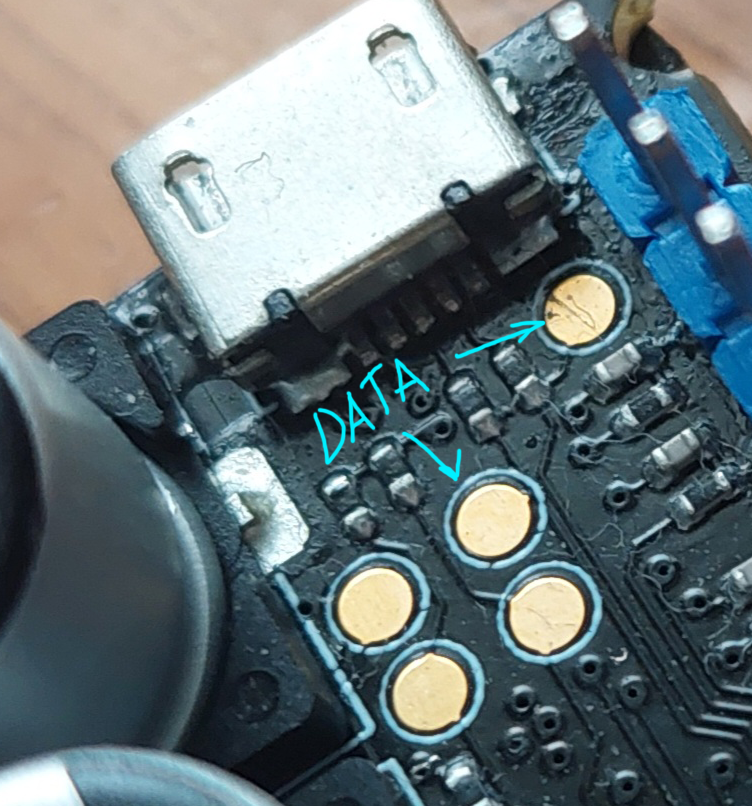
Эти два пятака дата лайн. Какой из них D+ какой D- надо проверить. Землю можно на любое открытое место по земле, +5 не присоединять. На одрайв питание от общей шины.

-
Ок. Вот тест. Что полезного можешь по нему сказать? По моменту - я уже давал данные замеров в этой теме. log 2022-04-26 18-15-35.csv
-
Я сделал так. Кабель с магнитным разьемом. В сам ODrive вставил "пиндюрку" и залил все там вокруг. А кабель отпадет если на него потянуть-надавить - такой себе предохранитель.
-
Ну тест тесту рознь. Вот какой я тест хотел бы видеть для сравнения так это такой. На мотор подается эффект Square или Sine с постепенно увиличивающейся амплитудой от 0 до 50% и постепенно увеличивающейся частотой , начиная с 500гц и до 1гц. Чтоб тест делал вывод теоретически рассчитанного усилия и реального вывода координаты руля(хотя это и не совсем репрезентативный показатель). И смотреть наложение двух этих графиков, на каком усилии будет пробиваться уже еффект и насколько будет отставать по фазе. Мне интересно какую частоту эффекта руль сможет реально воспроизвести и будет чувствоваться, и минимальную амплитуду которую сможет воспроизвести без смазывания на каждой из частот. Интересно построить такой себе графичек где по одной оси частота по второй аплитуда, а кривая отображает пересечение частоты и амплитуды на которой смещение стало ненулевым. А просто квадрат на максимум - ни о чем.
-
При чем тут бомбануло. Отмотал тему - вот лично по твоему же запросу такой тэст делал. И опять туда же. Или ты думаешь характеристики мотора за это время изменились?
-
Ну во первых, тесты там были в самом начале. А во вторых - что вы по этому тесту видите? Вот реально.. Если исключить просто фетиш. Тест показывает как при квадратном сигнале руль крутиться в пределах максимального угла поворота. На одном и том же руле поставив 180 градусов и 1080 будут две разные картинки. Поставив разные баранки будет разный результат. На разных БП будет разный результат(и от напряжения и от токов которые стабильно держит зависит). Расскажите хоть как вы их интерпретируете и что на этом графике для вас "хорошо" а что "плохо"? При этом в этом тесте например вообще нет информации о микродеталях вывода эффектов. Мощный руль с высокими оборотами на вольт раскуриться быстрее но может ли он воспроизвести супер мелкие неровности? А эти же неровности когда на нем уже есть некая пружина? А микронеровности на предсатурационном по усилию состоянии? Поподробнее. Магнитные энкодеры ОООООООчнь зависимы от центровки магнита. А учитывая что мотор многополюсный нужна очень высокая линейность вывода с энкодера для алгоритма. Я в след версии добавлю возможность вывода в дебаг рассчитаного усилия чтоб видеть что считает в отношении к отклонению руля. Поможет некоторые проблемы исследовать точнее. Как добавлю вывод рассчитаного усилия в график подумаем что не так
-
Руль как пружина работает? В обе стороны, Прощелкивание и на пружине или только на упоре?
-
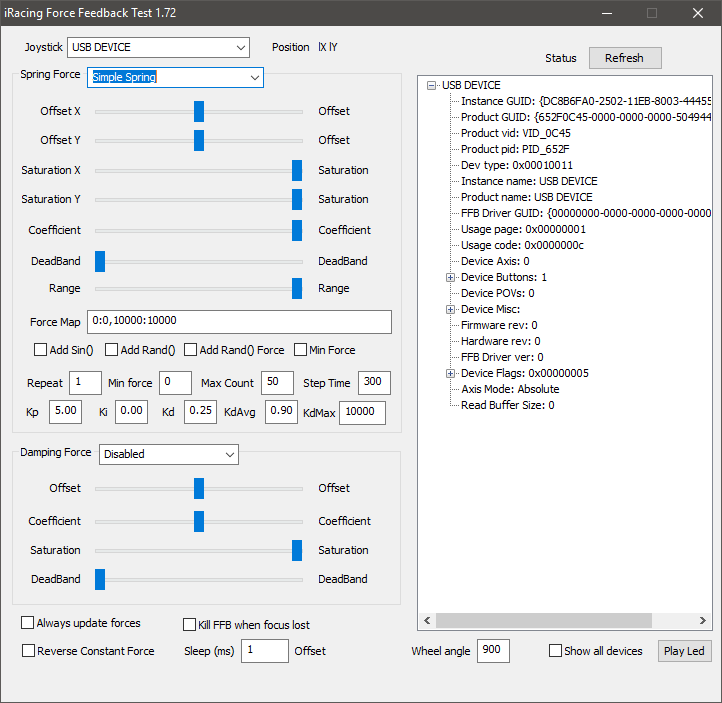
А обычная пружина? В Wheel Check просто выбрать руль в первом списке и Simple Spring во втором. Больше ничего не надо По виду фазы не прогорели. Калибровка крутиться как надо. Та и при переходе через стоп тоже крутиться как надо. Так что управляющая часть все ок.
-
Именно оно там и реализовано. Более того, в параметре настройки FOC debug можно включить вывод промежуточных параметров FOC (Id/Iq, Vd/Vq, alpha/beta) которые считаются в алгоритмe в виде осей джойстика. Они хорошо визуализируются c помощью VKB_JoyTester.exe Она показывает оси джойстика ввиде графиков изменения во времени. Очень удобно. Device ID скинь в личку
-
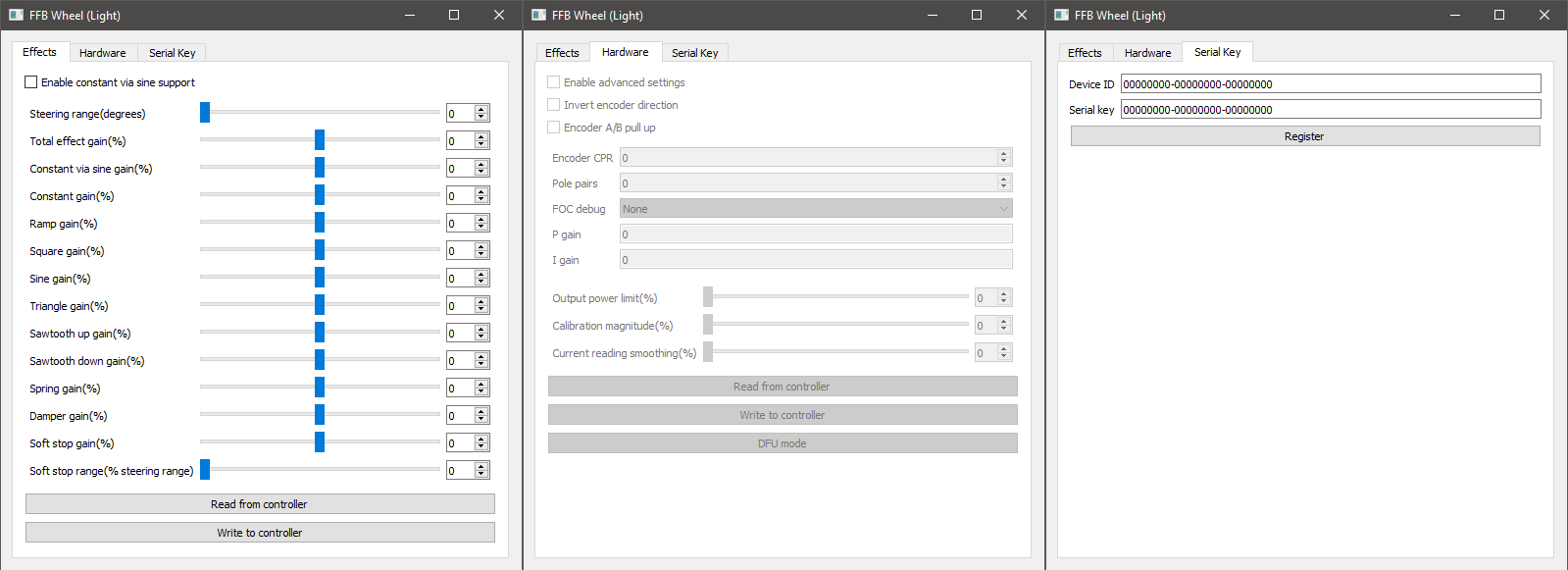
По настройкам Enable constant via sine - включает поддержку еффектов по принципу как их шлет Raceroom. Пока я встречал только в одной игре. Для всего кроме рейсрум лучше снимать. Steering range - думаю без вопросов. Дальше все с припиской gain - это настройка силы отдельных эффектов. Все что в плюс крутит в одну сторону все что в минус - в другую. Damper не реализован на данный момент, Total - общий масштаб усилия который накладывается на все сразу. Если нужно инвертировать все еффекты достаточно инвертировать Total. Soft stop range - расстояние в процентах от Steering range на котором нарастает усилие упоров в конце диапазона. Значения вывода оси джойстика при этом на этом диапазоне уже стоят в максимуме Вкладка Hardware неактивна пока не введен Serial Key для конкретного Device ID. Когда правильный ключик введен и нажата кнопка Register программа переходит в полный режим и на вкладке Hardware становиться доступна кнопка Enable advanced settings. (известный баг - ключ не сохраняется между перезапусками контролера - работаю над этим) Кнопка Enable advanced settings добавлена чтоб случайно не поменять что не надо. По хорошему все на этой вкладке надо настроить только раз и забыть. Invert encoder direction - меняет направление вывода энкодера. Делает то же самое что смена подключение выводов A и B к контролеру. Я предпочитаю чтоб при повороте руля по часовой значения по оси увеличивались. A/B pullup - ставить для енкодеров которым нужна подтяжка выводов к питанию. Большинство енкодеров по типу боченков Omron, но смотрите по инструкции к енкодеру надо или нет. Encoder CPR - суммарный CPR энкодера, с учетом редукции(если есть) PPR * 4 * отношениередукции Pole pairs - количество пар магнитов мотора. У ховербордного мотора в большинстве случаев их 15 FOC debug - вывод по двум осям парных параметров FOC алгоритма. Полезно при настройке параметров P Gain / I Gain. Поставить в None для обычного использования. Я обновил прошивку чтоб None было по дефолту. P Gain / I Gain - параметры алгоритма FOC. Их настройка отдельный вопрос, надо писать отдельный пост с картинками. туда же Constant reading smoothing. Параметры важные от них зависит "шумность" и точность алгоритма, но не простые в настройке. Будет отдельно по ним. Output power - общая мощность в процентах от физически возможной. Начинайте с низких значений и повышайте по чуть чуть пока мотор сохраняет стабильность и не перегревается. Кнопки - прочитать что записано в контролере - записать в контролер. На каждой вкладке свои. Изменения на вкладке еффектов сохраняются отдельно вкладки hardware.
- 912 ответов
-
- 11
-

-

-
Скинь Device ID мне в личку
-
Под инкрементальный? А то плата у меня осталась а вот AS504x все сбагрил.
-
И так, ребятушки, обновочка к Пасхе! Новая прошивка для ODrive. C полноценным FOC внутри. Тяжелый руль при подключении питания - в прошлом. Вот видосик как сейчас крутиться руль когда подано питание: Прошивка и UI тут https://github.com/o-devices/bldc-ffb-wheel/tree/master/firmware Для форумчан доступна полная версия, так что кидайте DeviceID с последней вкладки UI в личку - скину ключик. Из нового: - возможность использовать как энкодеры по типу омроновских так и AMT 102/103. - никаких кнопок. Поставили руль в центр, подали питание на ODrive, мотор провернется влево-вправо и готов к работе - регулируемое усилие по стопам на краях диапазона и зона в которой будет нарастать усилие при упоре(антимолоток на упоре) - собственно результат наибольшей е...ни - отсутствие затежеления руля при подаче питания - переключение в режим DFU из UI Протестировано на одноосевом ODrive, ODESC3.6, и на двухосевом ODrive. Но отсутствие багов не гарантирую, так что тестируйте пишите что найдете. P.S. Документация по всем настройка будет позже. Крутите параметры P Gain и I Gain по чуть чуть кто понимает что это. Output Power Limit тоже добавляйте по чуть чуть и тестируйте стабильность работы.
- 912 ответов
-
- 10
-
-
-
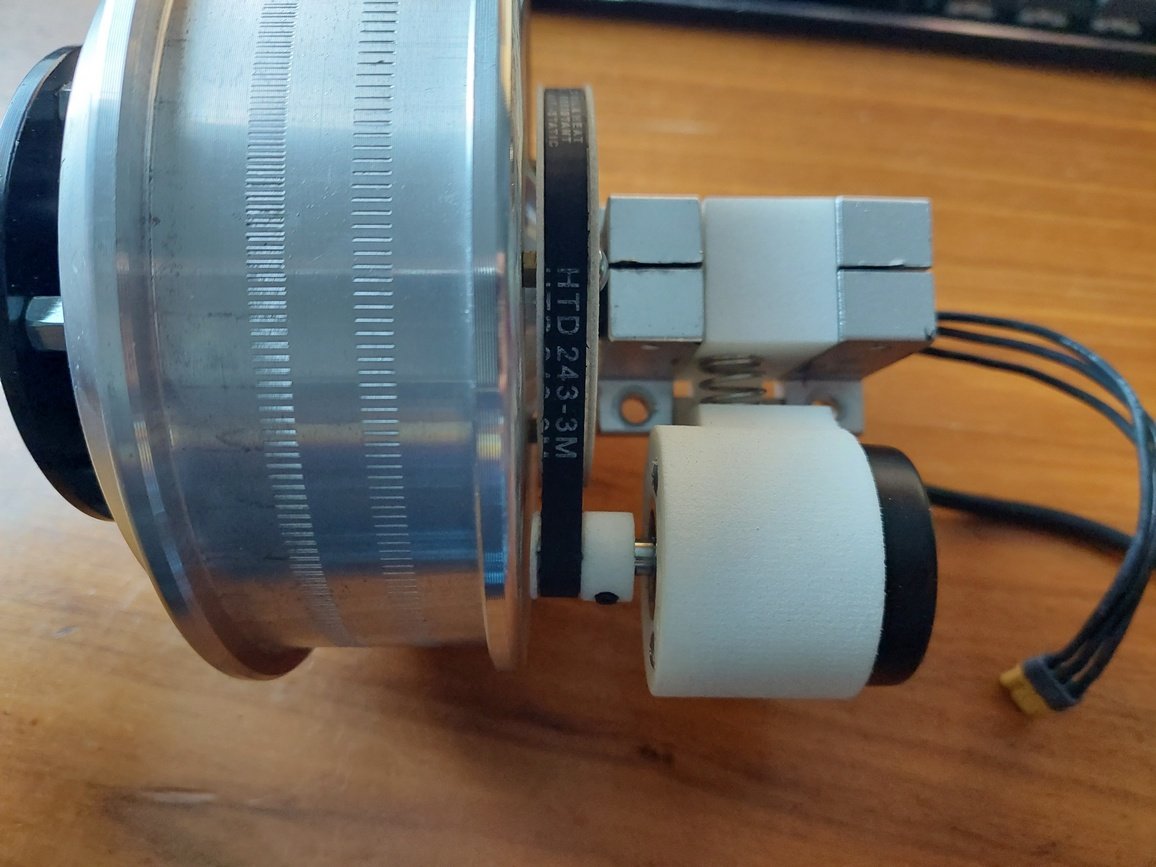
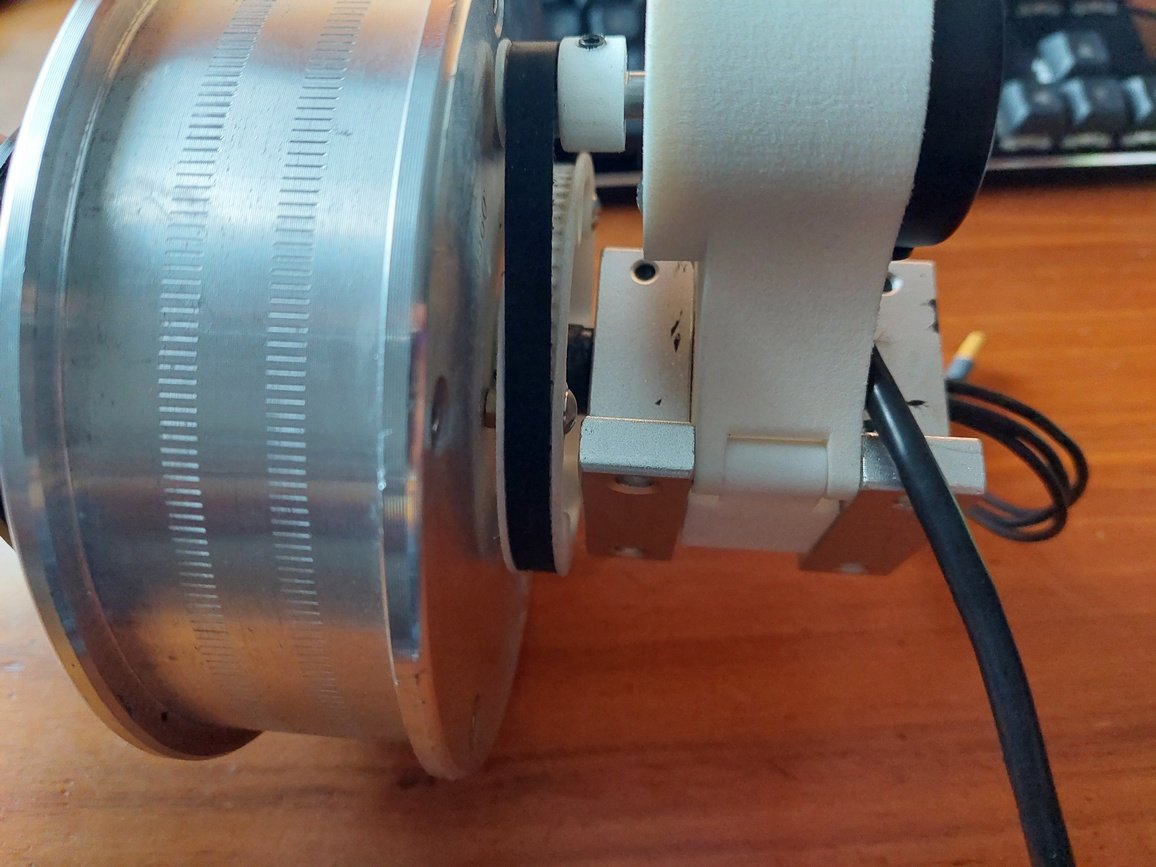
Мой вариант крепления енкодера. Подпружиниваю чтоб скомпенсировать несосность главного шкива на моторе. Как по мне работает хорошо, и более менее компактно.
-
Тема не умерла. Но работаю над вариантом с инкрементальным(он показывает себя гораздо лучше хоть и городить сложнее). Один я даже как-то запорол. Между и питанием и землей КЗ. Может кто разбирается почему такое может быть? Я его разобрал там минимум деталек, может кто понимает как найти у кого пробой кого перепаять?
-
Да. ODESC это ODrive по сути.
-
Примерно так. Но дело не в 'подогревании'. Джойстик зараза забирает все время. Эта часть вся написана уже. А вот программа настройки с компа ждет своего часа. Есть прошивка которая работает на одрайв с инкрементальным энкодером но нет к ней програмки на комп. Есть хорошая новость. Я сделал свободное вращение баранки без большого демпинга На ODrive такое провернуть можно. На моей плате - нет. Что значит "не успевает отрабатывать" и "тормозит". По каким признакам вы так считаете? Я снимаю видео с полной инструкцией от того что с мотором сделать до того как все соединить и прикрутить. Но читаем выше про джойстик :) Да. инкрементальный будет основным поддердиваемым. Можно без Z. Без него работает. Чтобы подключить к PS4 надо дать сони много денег чтоб они дали лицензию и код которым надо сказать PS4 что руль лицензирован С прошивкой которую делаю щас - будет ок. Демпинг лишний на руле убрал так что можно будет крутить. Если конечно будете использовать одно из решщений описаных выше для сброса генерируемых токов. P.S У кого есть ODrive, мотор и инкрементальный энкодер и пойдут дефолтные настройки могу кинуть прошивку на тесты пока нету программы настройки с компа.
-
Поясни? USB пулинг для платы стоит 2ms, эффекты персчитываются в прошивке 1000 раз в секунду, позиция руля пересчитывается 200 раз в секунду. Вам какую частоту еще повышать надо? Вот VESC прошивка более читабельна. В каком режиме VESC используется при этом? Как сам VESC настраивали? Идеально найти человека который понимает математику FOC алгоритмов. Всякие Field Weakening и Feed Forward. Мне бы с таким человеком пообщаться сильно помогло бы
-
Отключать то без проблем когда 0, проблема что 0 из игра практически не приходит. Всегда есть какой-то эффект и тогда уже бтнки замкнуты и описанный эффект демпфинга присутствует. Тут нужно правильный FOC алгорит. Раз люди пишут что на той прошивке ховербордной есть фривилинг, значит это возможно. Нужно просто найти правильный алгоритм.