propeler
-
Постов
171 -
Зарегистрирован
-
Посещение
-
Победитель дней
51
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент propeler
-
Шире чем на внутренний диаметр подшипника не высверлишь в любом случае. Я сверлю на максимум возможный ступенчатым сверлом Я бес понятия протокол педалей трастмастера. Поэтому не могу сказать можно ли его вообще добавить. Больше лучше. поэтому 11.8 Одноосевой не нужно
-
Недостаток что надо более менее соосно все сделать. Но компактно, раз откалибровал и забыл. Инкрементальный - надо городить крепления, калибровка небольшая нужна на каждом запуске. Но работает и то и то. 6.5 дюйма 24 или 28 мм магниты. На самом деле нет. Можно взять кубик или цилиндр с обычным намагничиванием просто правильно его повернуть.
-
у меня USB хаб на столе на 8 поротов я все в него тыкаю. А мне есть что. руль, джойстик, руд, шифтер, мыша и... тадамс. Баранка. Я ее в плату не тыкаю, USB шнур спиралька мягче чем это дубовый кабель на много жил чтоб вести SPI Линк? ))
-
Можно без него в DFU режиме. Если конкретную версия ODrive имеет переключатель в этот режим(не все имеют) Эта плата сама по себе STM контролер и он подключается к USB как отдельное устройство. Смысла его подключать к рулю нет.
-
Переходим на Fanatec CSL DD Шютка. У нас можно найти если поискать по 15 баксов за штуку. Дорого. Сейчас ODrive проще получается. Можно заказать со всей мелочевкой кроме стмки и припаять самому. Но. Надо руки из правильного места
-
Тебе вдвойне повезло. Корпус не выкидывай. Он прекрасно будет базой. Его отпилить, засунуть внутрь электронику, сделать крышку - и с базой не надо мудрить. Пример(не мое, с другого форума) Какие именно педали, какой именно батонбокс, какой шифтер, какой ручник? Их много разных, стандарта общения у них нет, на каждое отдельное устройство надо знать его протокол и разводку по проводам. С большой вероятностью да. Там более чем уверен внутри просто сдвиговые регистры по SPI шине. Надо будет только правильно определить какой провод за что отвечает. Зачем вам 36v? ОDrive это и есть STM32 На нем просто в добавок есть контролер мотора и силовая часть. Ну и выводы не все выведены. С точки зреня контроля всего этого плата справиться но надо под каждый отдельны девайс думать как его присоединять. Если эти девайсы просто кнопки которые припаяны к сдвиговым регистрам это одно, если что-то более сложное - совсем другое дело. Вообще то нет. Все не так просто. Во первых мотор как и любой електрический компонент подвержен закону Ома. Больше вольт - больше ток. Во вторых мотор чем больше ток тем выше нагрев. В третьих - для обеспечения тех же самых токов БП на 36v нужен более мощный. Например при токе 10А на 12V это жалких 120ватт, а для 36V нужен уже на 360ватт. И это при том что благодаря контролю ШИМ 36v на мотор не будет подаваться. Имеется ввиду на руле. Потому что в мотор работает в статике постоянно, в отличии от скутера, где он работает всегда на оборотах. Не буду вдаваться в детали но это оооочень большая разница. По опыту уже использования руля под 500 часов. Даже 19V ему не обязательный БП. На 19V в настройках руля выставлено 50%. Если использовать 12V БП, то ставлю на 75%. И это 8Nm. На 36V нужно будет ставить 25%. И вот вопрос - зачем? Точность воспроизведения силы при этом падает в 3 раза, потому что падает разрешение ШИМ. А если ставить больше - то нужно уже заниматься охлаждением мотора, потому что на 50% на 36V он будет жрать под 20A. А ему это гарантировано много(в статике на руле) Педали на лоадцелл требуют электроники близко к датчикам. Тянуть из под пола выводы от всех датчиков на стол - уверены что это удобно? Руль - кнопки на нем на что вывод? SPI? или что-то другое? Сиквентал - какой тип вывода? Ручник - какой датчик и тип вывода?

-
по этому даташиту никак. Я сделаю прошивку чтоб вручную замерить.
-
Не то. О не калибруется корректно. Сколько электрических оборотов у этого мотора на один физический? Китайские есть и на 24, и на 48, и на 56. Переменный ток имеется ввиду на мотор. 3 входных фазы вместо 2х входных в моторах постоянного тока. VESC и ODrive очень близки по железу. Так что что работает с VESC будет работать с ODrive. А почему хотите ODrive? с точки зрения железа преимуществ у него нет особо. Нет. Я тестировал разные компьютерные БП, они не справляются с резким нарастанием и падением нагрузки. Уходят в защиту. У меня нет всех игр чтобы тестировать в каких не работает. Как выше написали. У меня из игр есть Automobilista 2, rFactor 2, Project Cars 2, RaceRoom, Asseto Corsa, Asseto Corsa Competizione и F1 2019. Это то на чем я могу тестировать на данный момент. На скольки амперах?
-
попробуй odrive-as504x-20210820 отсюда https://github.com/o-devices/bldc-ffb-wheel/tree/master/firmware. UI тоже скачай обновленный.
-
Старая прошивка там были версии с глюками. Щас не вспомню. Правилась несколько раз с тех времен. Я залил на github последнюю актуальную поробуй ее. https://github.com/o-devices/bldc-ffb-wheel/tree/master/firmware Опс. Тебе с абсолютным энкодером одрайв... Сделаю версию отпишу тут когда залью.
-
Актуальная версия прошивки под кастом плату. - Устранена "пила" на крайних положениях - Немного переработана калибровка btn8982-as504x-firmware-20210806.zip
-
Ссылка умерла наверное потому что бесплатная. Я 2го вернусь с отпуска залью на гитхаб
-
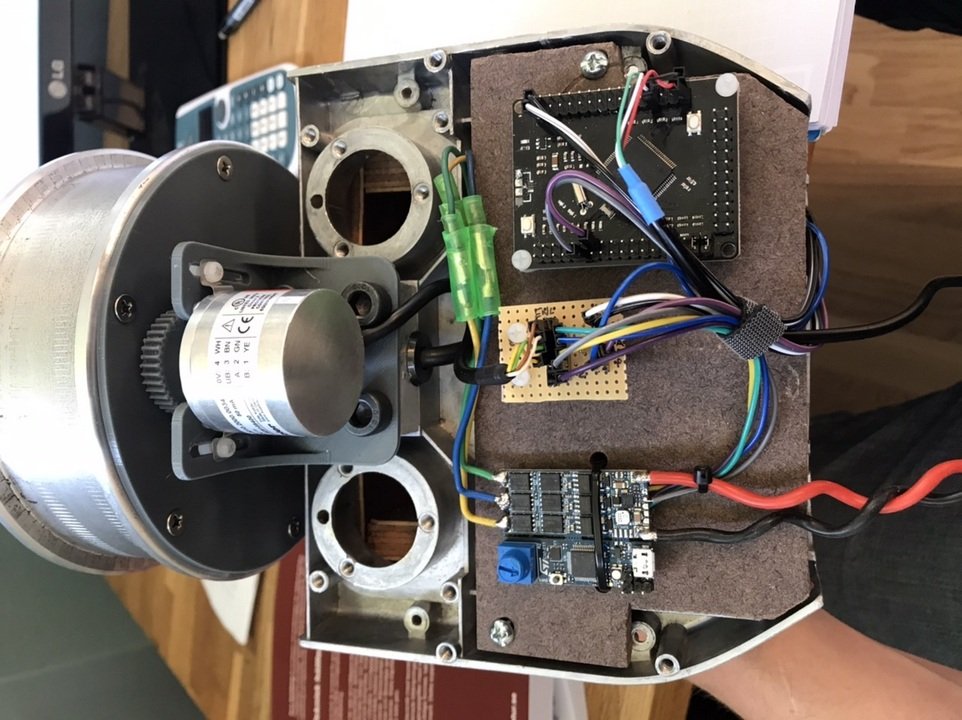
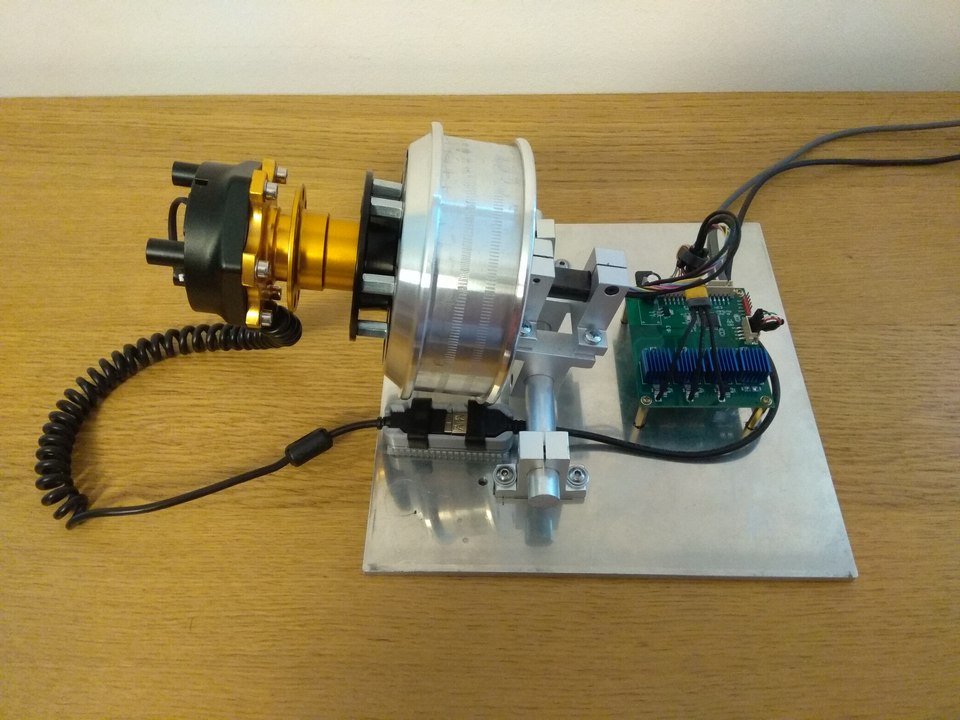
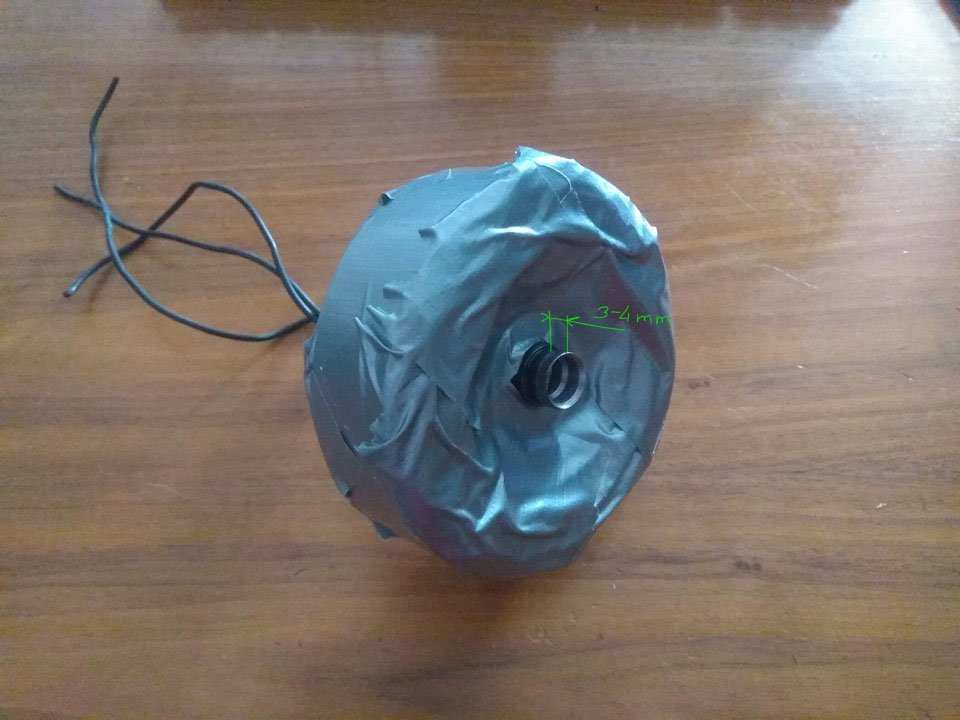
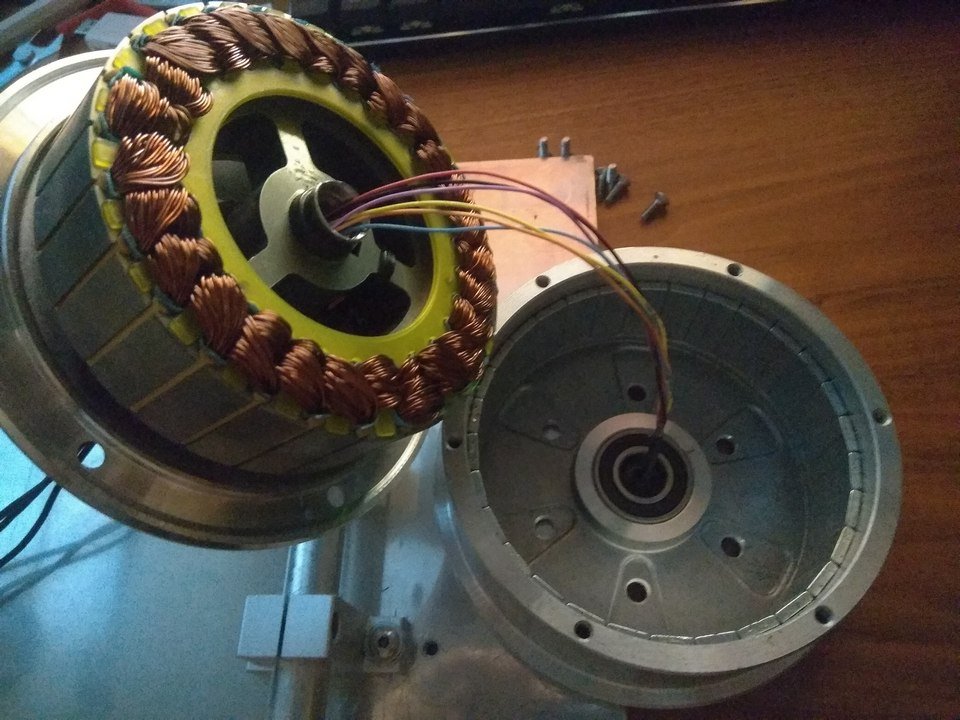
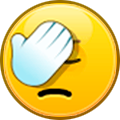
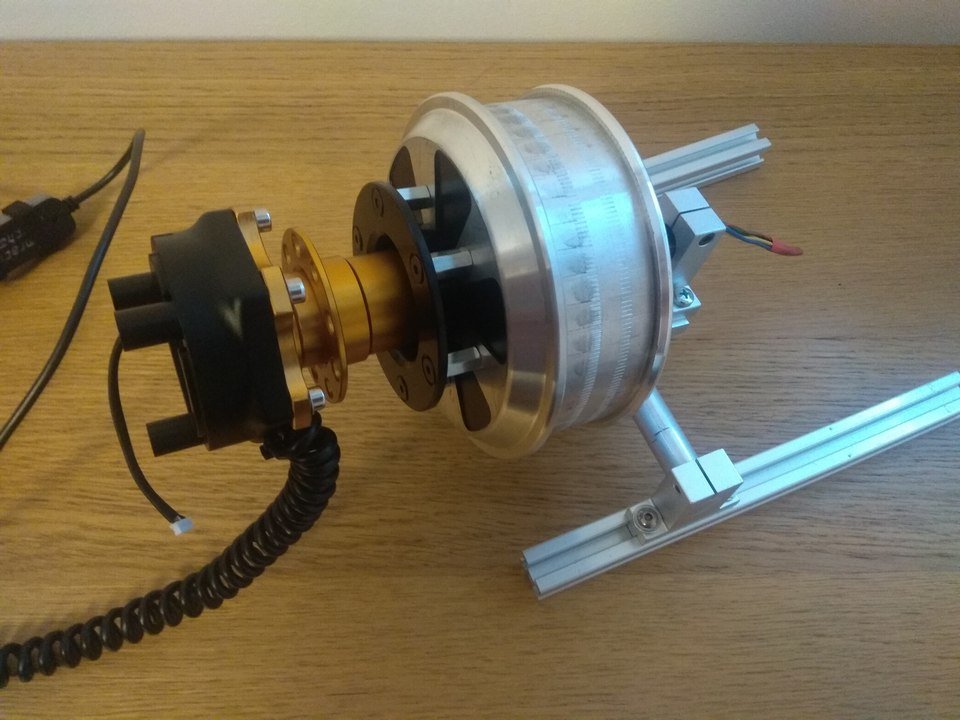
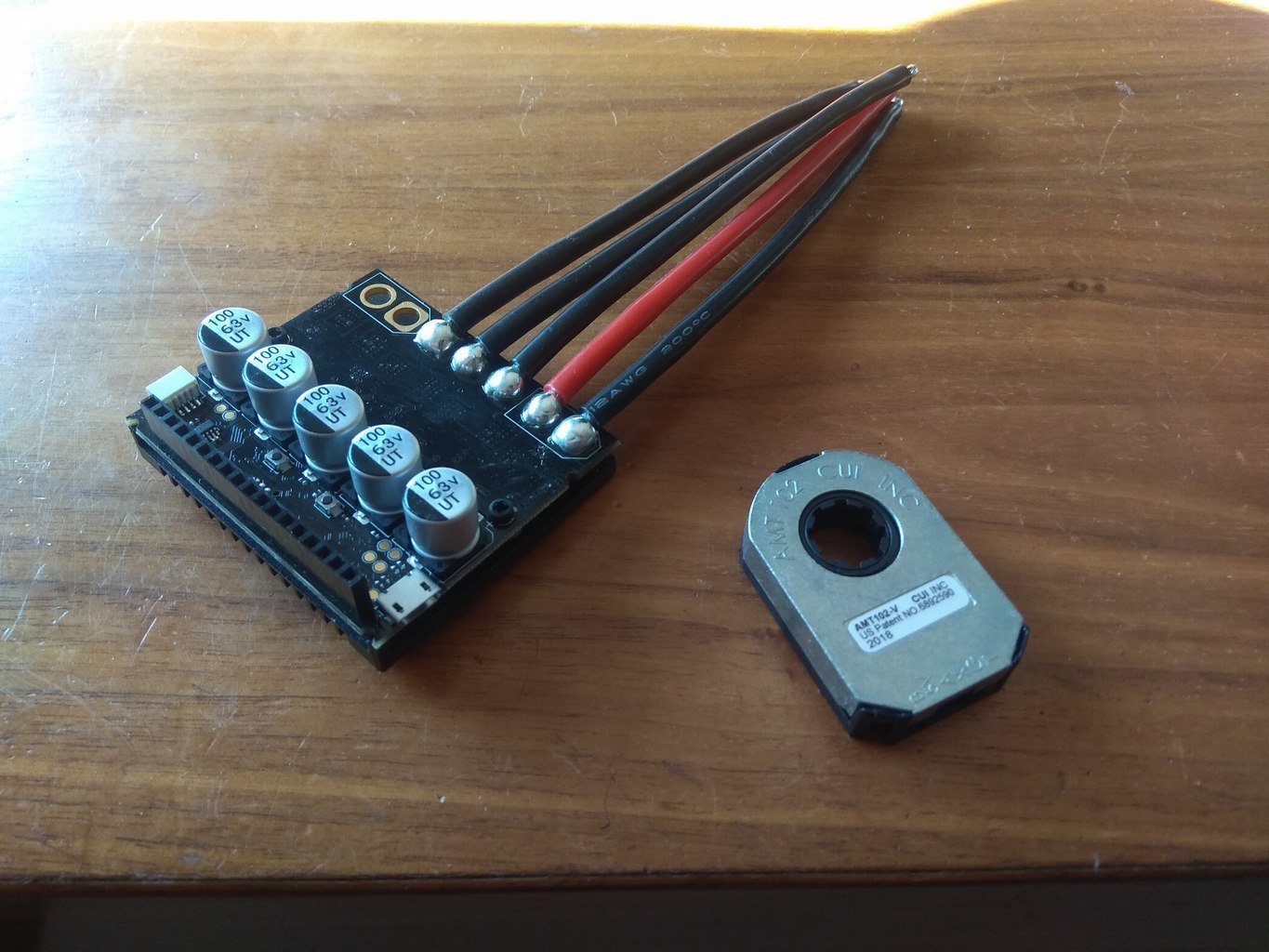
Пока товарищ @Kolerне делиться своей красотой поделюсь своими наработками :) Представляю вашему вниманию руль для создания которого понадобиться всего лишь вот это набор инструментов: Этот набор напечатанных деталей: И стандартные покупные элементы(за исключением электроники ) чтобы собрать такую базу: И так как и раньше нам понадобиться мотор от гиро скутера. Мне по душе вариант с шестью лучами на фронтальной панели., уж очень легко на нем центрировать все и делать отверстия под квикрилиз. Разбираем его и дорабатываем статор. Точнее вал статора. Нам его надо рассверлить. Чтобы не выковыривать потом стружку предварительно обматываем скотчем. Рассверливаем конусным сверлом пока до упора подшипнике останется 3-4мм. Этого достаточно чтобы вал держался в подшипнике и будет место под энкодер. Потом сверлом на 6 досверливаем отверстие чтобы соединилось с уже существующим в валу дабы пропустить через него провода: В барабане конусным сверлом сверлим отверстие по центру до ширины подшипника, и 6 отверстий под крепление квикрилиза( в моем случае на окружности 70мм). Энкодер вклеиваем эпоксидкой в мелкий 3д печатные переходник и вставляем в подшипник чтобы не торчал за уровень барабана: К сожалению забыл сфотографировать кадр с установкой магнита перед сборкой в базе квикрелиза, опишу на словах. Магнит вставляем во вторую 3д печатную деталь, в базе квикрилиза немного рассверливаем посадочное место конусным сверлом и вставляем в посадочное место этот печатный переходник. Крепим квикрелиз на стандартных высоких гайках M5, они как раз по высоте базы релиза. Печатный переходник магнита какраз натурально центруется между лучами барабана. Аккуратно ставим обратно барабан со всем этим добром, и зажимаем все в конструкцию из подпорок валов 16мм и куска вала того же диаметра. Конструкции. как все скрутить видно на основном фото. Вуала. Готово. Подключаем плату, прикручиваем баранку - готово! Перечень всех стандартных элементов которые нужны для базы: Опора вала SK16 - 6шт Кусок вала 16мм длиной 200мм - 1шт Высокие гайки M5 - 6шт Винты М5x10 - 6шт (крепление стоек к барабану) Винты M5x20 - 4шт(для центрального узла базы) Гайки M5 - 4шт(для центрального узла базы) Квикрилиз https://pl.aliexpress.com/item/4001044784302.html - 1шт Мотор от гироскутера - 1шт В качестве базы можно использовать все что угодно к чему сможете прикрутиться. У меня кусок люминя 6мм. По ценам Польши все про все (вместе с электроникой и пластиной на основание) в зависимости от удачи по покупке мотора выходит по цене от 140 до 180 долларов и не требует дополнительного заказа изготовления чего-то сложного. Вот такая вот исчтория. З.Ы. Я не представляю себе более простого и дешевого в изготовлении ДД FFB руля. А вы?
-
@Koler Не томи уже покажи людям какую красоту ты сочинил
-
Продолжаем изыскания. В дело пошел квикрилиз с алика. Становиться на корпус какраз на стандартных высоких гайках M5. База из 6 стандартных SK16 и куска вала 16мм. Полная свобода в настройках угла, крепить можно к чему вздумается. Итого из нестандартных элементов остается шкив ремня на энкодер, и само крепление энкодера(пока не нарисовал не напечатал но это дело времени). В остальном руль можно будет полностью собрать из стандартных элементов. Из работы только просверлить 6 отверстий 5мм в корпусе и 6 отверстий 3мм на задней крышке мотора. Это будет самый простой в изготовлении DD руль
-
Но будет работать любой такого плана. У меня соотношение 12:72 Это не мое. Это отсюда
-
Там инкрементальный. Под ODrive абсолютный по SPI работает с проблемами. И дабы не плодить вопросы почему не работает как пофиксить я на ODrive версию с абсолютным не делал. Пока что. Но позже возможно. Сейчас нет времени занимаюсь джойстиком. amt102 на ховербордный не ставился. Он был просто для доводки прошивки. Предполагается ставить инкрементальник через ремень по такому принципу:
-
Не совсем. на 12 вольт мотор (в частности который у меня) не может выйти на свою полную мощность. Он просто не может физически вобрать 30А. Я не буду вдаваться в тонкости физики мотора но вкратце - ему не дадут это сделать параметры обмотки. Примерно так по прикидкам на 12 вольт он максимум выйдет на 10-11 ампер. Сколько бы ваш блок питания ему не предлагал. На 19 он выйдет по прикидкам на 16-17 ампер, но это ему перебор. Короткую сессию выдержит но например на 1час гонке будет к концу гонки ооочень горячий. Ну и использовать его на полную мощность то еще удовольствие. Я вот на постоянную катаю на 50% мощности при 19 вольтовом блоке питания, на 75% это уже борьба у меня стол при такое мощность прыгает(хотя он довольно массивный) и кресло съезжает. Ставлю на 75% только иногда ради фана пару кругов проехать. Точно рулить уже тяжеловато на таком усилии.
-
Да, ODESC. Разницы практически никакой c ODRIVE. Они убрали переключатель DFU и CAN шины по сравнению с оригиналом, немного поменяли распиновку выходов на разьем, добавили мосфеты на BRAKING резистор. С апаратной точки совместимо с ODrive. Прошивка которую я выложил выше совместима (собственно на ней и тестировалось). Так что можно прошивать и будет работать. У Вас есть желание в нее что-то дописать?
-
Можно посчитать так. контролер поддерживает около 32000 отсчетов в каждую сторону. 32767 если быть точнее но чтоб не выйти за лимит безопасно пусть будет 32000. Если взять например 540 градусов диапазон поворота получается в одну сторону 270 градусов. Значит CPR до 32000/270*360 = 42666 будет работать. На диапазоне 900 градусов соответственно до 32000/450*360 = 25600. Но это при отношении 1 к 1. Если энкодер подключен будет через редуктор то надо делить на степень редукции еще.
-
Контролер использует слегка упрощенный Field Oriented Control (FOC) алгоритм для точного управления BLDC мотором. Для этого нужно знать две величины: электричесий ноль, и количество отсчетов энкодера на 360 градусов поворота магнитного поля. Этот алгоритм сложнее чем простой пид алгоритм который используется для управления щёточным мотором, но при этом можно очень точно управлять усилием. Например мой руль с блоком на 19 вольт воспроизводит эффекты на усилии 30-50 единиц из возможных 10000. Это меньше полу процента. Но для этого нужно проводить небольшую калибровку на старте. Она не длинная около 4-5 секунд в общем.
-
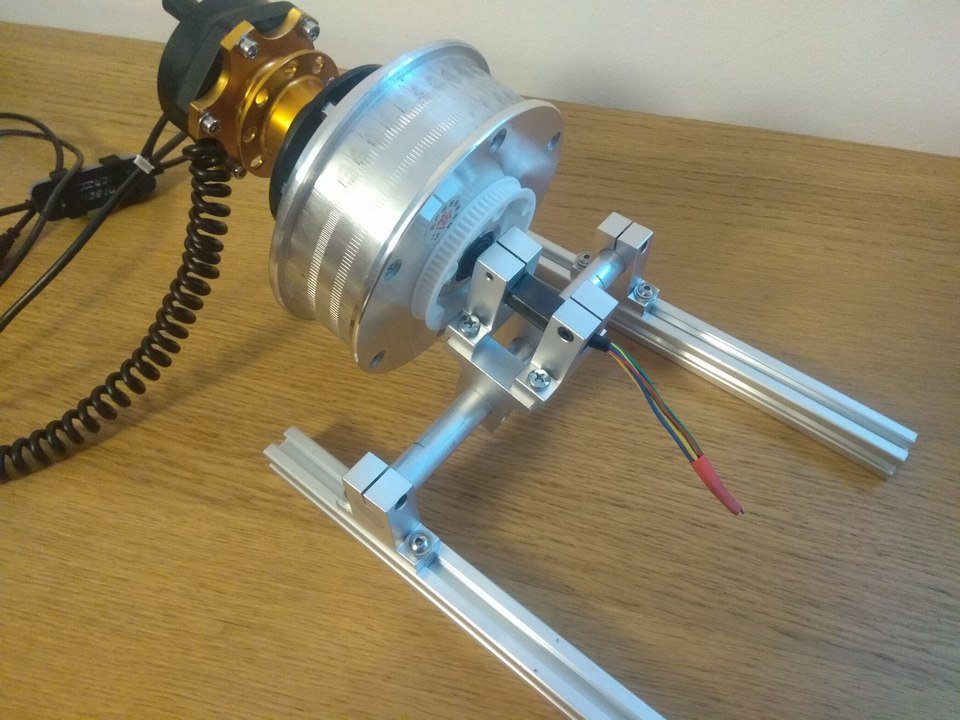
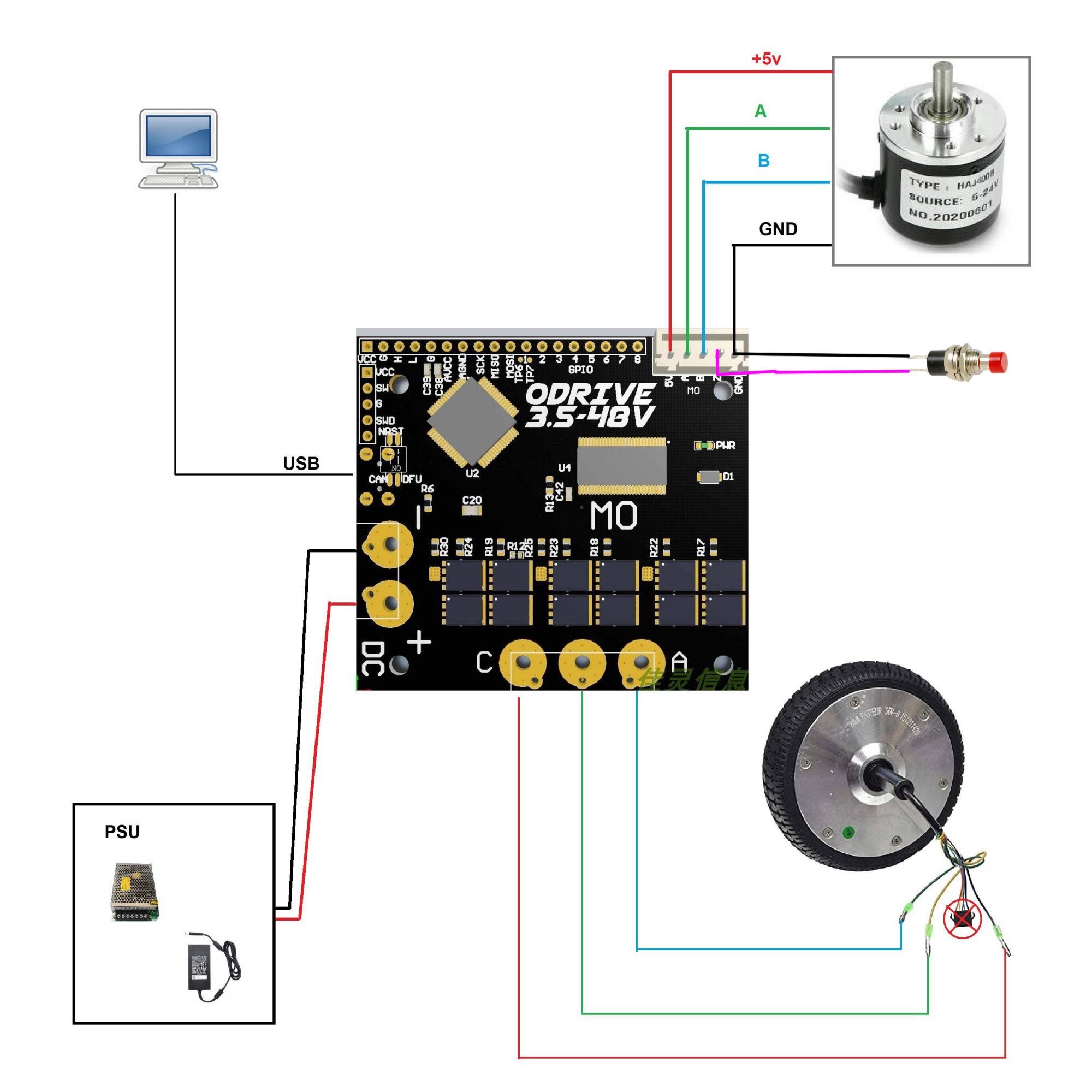
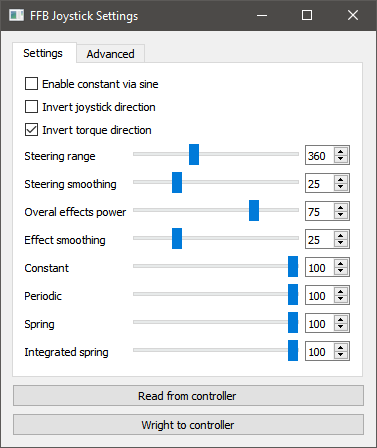
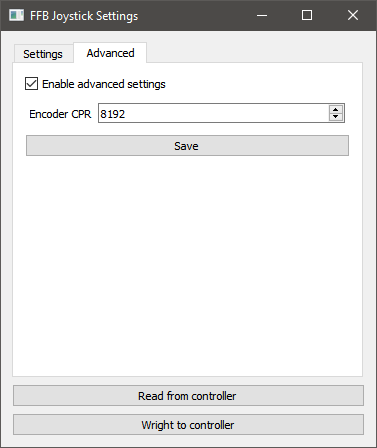
Готово. Прошивка для ODrive с инкрементальным энкодером. Залил на мегафайл так как не знаю куда лучше. https://megafile.cc/d/P9or/odrive-ffb-wheel-20210530 Схема подключения чуть модифицировалась. Добавилась кнопка для сброса позиции центра. Это добавляет необходимость нажимать кнопку после включения руля для того чтобы задать центр, но позволяет использовать любые китайские энкодеры у которых есть только два выхода и нету индекса. После заливки прошивки нужно запустить программу настройки задать по желанию и нажать кнопку Write to controller Потом перейти на вкладку advanced ввести CPR для вашего энкодера и нажать кнопку Save\ После перезагрузки контролера он будет в рабочем состоянии. При включении мотор будет медленно поворачиваться в одну сторону, потом в другую, потом возвращаться в изначальное положение. Это процедура калибровки и она проходит при каждом запуске. После остановки мотора включается нормальный режим в котором устройство готово к использованию. Нажатие кнопки делает текущее положение центром отсчета. З.Ы. Ну и да, можно подключать ЛЮБОЙ BLDC мотор который потянет ваш ODrive
-
Приехал амперметр сделал более точные замеры силы мотора. Реальные значения для конкретно этого мотора который на первых фото: 3A -> 4.4Nm 5A -> 5.9Nm 8A -> 7.3Nm Выше мой БП не тянет, уходит в защиту. з.ы.Прошивка под ODrive плюс инкрементальник готова, доделываю програмку настройки с компа и будет в доступе. з.ы.ы Переосмыслил всю конструкцию, готовлю инструкцию по сборке из стандартных покупных компонентов, пару деталей 3д печать, пару резаных из метала и абсолютный минимум изменений в сам мотор. Будет возможно собрать в домашних условиях без применения спец инструмента
-
Прошивка одинаковая на 85% где-то. Под кастомную плату прошивка готова полностью для варианта с энкодером AS5048/AS5047. Ее тестирует @Koler. Как он скажет что все ок - выложу ее... Или и он может)) С инкрементальным тоже сделаю версию но после того как закончу с версией под ODrive.
-
Сейчас это первоочередная задача у меня. Приехали новые "игрушки". Все-таки прихожу к тому что комбинация ODrive + инкрементальник будет основной как требующей минимальной работы паяльником и доступной без шаманства, доп плат и все такое. Так что можно ожидать уже скоро: В прошивке там серьезная ошибка и я пока скрыл проект на гитхабе. Как поправлю открою опять