propeler
-
Постов
171 -
Зарегистрирован
-
Посещение
-
Победитель дней
51
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент propeler
-
В тех рулях стоят сервомоторы промышленные по 300+ баксов, а не дешёвый 20баксовый мотор от ховерборда в те моторы больше ума вложено. Характеристики индукции и прочего разные. Ну у нас не настолько страшно. Я изучаю вопрос. Как-то ж в Торк режиме прошивка вышеуказанная работает со свободным вращением... Есть мысли о том что может дать нужный результат. А может и не дать. Вообще с 300мм баранкой эффект уже не такой страшный. С 320мм уже вообще приятно. На покупных рулях ведь народ демпинг все равно накручивает. Совсем пустой руль то тоже не сильно приятен
-
Надо бы глянуть. Посмотрю как реализовано. Спасибо за наводку. З.Ы. Посмотрел я в код... это жесть. Код походу сгенерирован из матлаба и что-то там разобрать анриал. увы.
-
Да. Потому что по сути во время работы мотор всегда в закороченном состоянии. Часть времени на общую землю, часть на питание. Так что это можно считать встроенным уровнем демнпинга мотора. От него не избавиться даже сбросом тока на тормозной резистор(проверено, сброс уже реализован в черновом варианте скоро выкачу прошивку). Мне только недавно дошло что он не поможет уменьшить демпфирование по описаной выше причине....
-
Которая на гитхаб Еще нет. Но скоро будет можно
-
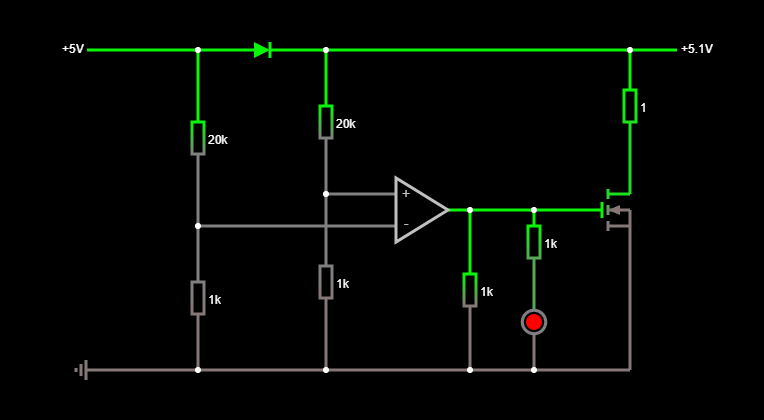
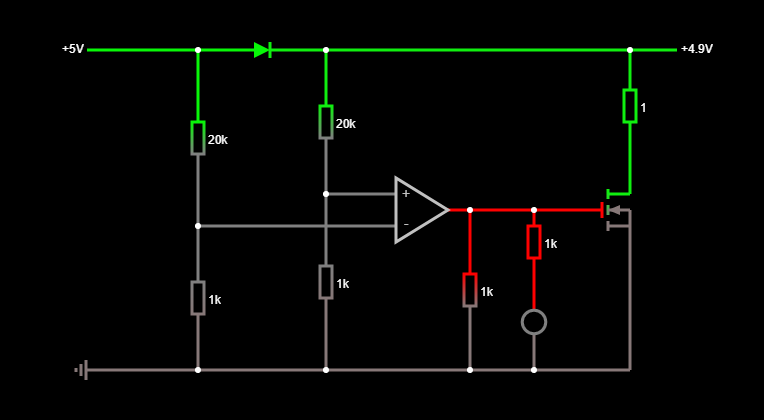
Думаю это просто ошибка KiCad. Я помоделировал в симуляторе без той точки возле R4 все должно работать

-
А можно чуть деталей для начинающих электронщиков как работает? Правильно я понимаю что реагирует на рост напряжения в цепи?
-
Да, типа того.
-
Да, есть, также есть у одно осевого ODESC. И на одрайв и на кастом плате. Но кастом плату можно уже начать забывать. Ее сейчас фиг сделаешь потому что нет комплектующих. Ни стмок ни бтнок. Для одноосевого ODrive сделаю вариант с выводом PWM к которому надо будет прицепить внешнюю цепь с транзистором. В самом ODrive ничего не надо будет модифицировать. Типа как делаю на форуме xsimulator: Синий провод будет на одну из ног ODriveю На данный момент не скажу(надо еще изучить вопрос), но ориентировочно это будет Logic Level Mosfet (не знаю как оно по русски).
-
6.5. И лучше с магнитами 25-30 мм. Инкрементальный. Че-то с абсолютными слишком у многих проблемы. С ребятами которые уже начали делать на абсолютном мы это дело до ума доведем, но дальше я буду развивать только вариант на инкрементальном ка более надежный. Эт на моей прошивке? Че за мотор такой классный? Какие характеристики? Что за БП? ....Не готов пока сброс тока на тормозной... Но обещаю - будет!
-
btn8982-as504x-20210809-ui.exe должна работать. Помоему она общая для обеих плат с абсолютным
-
https://github.com/o-devices/bldc-ffb-wheel/tree/master/firmware там же рядом settings-ui лежит, это и есть программа настройки Ох если бы)) Уже на подходе следующая итерация без пластика)) И целый список хотелок в софте))
-
Оффтоп, но все-же. Чтоб было понятно почему мало обновок в этой теме
-
Не поверишь, вот минуту назад залил прошивку под ODrive и кастомную плату с абсолютным энкодером которая наконец-то заработала в Dirt Rally 2.0. \ В файл steamapps\common\DiRT Rally 2.0\input\devices\device_defines.xml добавить запись: <device id="{590D0483-0000-0000-0000-504944564944}" name="diy_ffb_wheel" priority="100" type="wheel" /> В папке steamapps\common\DiRT Rally 2.0\input\actionmaps создать файл diy_ffb.xml с содержанием: <?xml version="1.0" encoding="utf-8"?> <action_map name="diy_ffb_wheel" device_name="diy_ffb_wheel" library="lib_direct_input"> <axis_defaults> <axis name="di_x_axis"> <action deadzone="0" name="driving.steer.left" /> <action deadzone="0" name="driving.steer.right" /> </axis> </axis_defaults> <group name="driving"> <group name="steer"> <action name="left"> <axis name="di_x_axis" type="lower" /> </action> <action name="right"> <axis name="di_x_axis" type="upper" /> </action> </group> </group> </action_map> Не уверен нужны ли последние два шага, но я у себя сделал и не успел проверить что будет если удалить их
-
В прошлой версии да. Но я пишу поддержку Z индекса в том числе. Так что будет и Z индекс. https://github.com/o-devices/bldc-ffb-wheel/tree/master/firmware/hex
-
Или положить в тонкую медную трубку. Главное чтоб провода не терло. Я этот вариант проверял, работает. Но опять же та же сложность - надо сверлить вал. И тут как повезет. У меня один вал запорот сломавшимся глубоко в отверстии сверлом.
-
Главное что я хочу доделать - сброс токов генерируемых моторо при быстром вращении против усилия на тормозной резистор. Сейчас если быстро крутить руль напряжение в цепи возрастает и недостаточно мощные БП уходит в защиту. Это первоочередная фича для того чтобы можно было использовать руль на полную.
-
У меня ефир так забит что ESP c блютусом отваливается на расстоянии 30 см от приемника, а nRF24L01 устанавливает конекшн через раз разнесенная на 50см. Я на попытки сделать беспроводной руль забил. Про доделку ODrive. Из-за того что это изначально контролер для мотора, после подключения энкодера на нем остается не так много выводов. Это раз. Писать что-то сложнее чем чтение сдвиговых регистров в приоритетах уходит далеко вниз. Тут еще по основным фичам работать и работать. Жто два. И три - чтобы добавлять подключение какого то устройства - нужно такое устройство иметь/мастерить. Жизнь показывает, что написание таких вещей просто по "даташиту" без теста реального устройства - не всегда работает.
-
Будет ;)
-
Так для абсолютного энкодера + ODrive есть же прошивка. Если не можете найти выложу вечером заново
-
Бери инкрементальный. У абсолютного есть свои плюсы но на практике оказалось больше мороки. На джойстике я например не смог побороть шумы абсолютного энкодера и переписал прошивку под инкрементальный(ушло много времени поэтому нет апдейтов здесь). Под руль прошивка под инкрементальный будет основной по той же причине. Конструкция получается чуть более громоздкая, но работает чуть лучше. Не знаю как у ребят которые собрали с абсолютным, но у меня он "шумит". Проскакивают периодически какие-то импульсы. Оно не критично, но по сравнению с решением на инкрементальном энкодере проверенном на джойстике(которое получилось просто абсолютно гладкое и бесшумное) меня теперь это периодический шум напрягает. Так что инкренментальный.
-
С полность универсальной не факт. Но для пары одрайв+инкрементальный будет в этом году. Прямо сейчас занят дебагом её. Версия под одрайв плюс абсолютный и кастомная плата плюс абсолютный готова то уже. На днях залью последнюю версию. По сути больше то ничего не нужно
-
Идеальный мотор - kV до 20, лучше 15. Пар полюсов как можно больше. не меньше 15. Ротор с низким моментом вращения. Магниты со смещением по спирали. Но мне кажется такое из пластика не сделать
-
Сколько Nm на скольки амперах?
-
Она уже есть. Вот у человека все завелось сразу. Есть недочёты из-за которых она не заводиться на некоторых комбинациях, но в общем случае она рабочая.