propeler
-
Постов
171 -
Зарегистрирован
-
Посещение
-
Победитель дней
51
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент propeler
-
Нет. Не влияет от слова совсем. Увеличение уменьшение счётчика энкодеры происходит на аппаратном уровне и не вносит эффекта в скорость работы Без редуктора мало. С редуктором например 1 к 5 уже более чем достаточно Лучше. До определенного момента. Суммарный CPR с учётом редуктора (отсчето на оборот, не пульсов) от 5400 на оборот уже достаточно(это 1 отсчёт на один градус электрического оборота), свыше 15000 отсчетов на оборот уже перебор. Из за всех погрешностей и шумов в системе такая точность позицирования не достижима.
-
Да. Выше там вон писали что на ней сразу завелось. Можно спросить у какого продавца брали.
-
Не лучший. Она даже задумывалась как более дешёвая альтернатива ODrive. ODrive отличный вариант. Китайцы своими руками бывает портят ему репутацию, но в общем он лучше чем моя плата. Сейчас на рынке есть версия от flipsky с названием ODESC 3.6. по крайней мере внешне по качеству сборки очень все выглядит у него хорошо. Так что можно его рассмотреть к покупке. Это дорого для моей платы. Не стоит она таких денег. Чуть добавить и два ODrive можно взять. Она как раз достаточно умная для нашей задачи. Не волнуйтесь. Прошивка под одрайв будет доведена до ума. И с конкретно вашей проблемой разберемся. Не бросим никого с неразрешенными проблемами Не сильно сложно. Но на все надо время. Пока расстановка приоритетов другая: джойстик, исправление багов в текущей прошивке под руль, авиапедали с форсфидбеком и где-то потом всё остальное.
-
В бтс/бтн интегрирована по току и перегреву. Но там он возвращается в нормальное состояние как только ток и нагрев снижается. В данном же случае речь идёт об ОДрайв. Там защита выполнена на уровне драйвера мосфетов. Там в даташите много всего. Я инициализирую в прошивке дефолтными какими-то значениями драйвер. Надо смотреть что там покрутить. И гарантировано буду этим заниматься. Потому что кастомную плату на бтнках щас Фик сделаешь. Ни СТМок ни бтнок щас не купить. Так что остаётся ОДрайв... Хотя в нем есть один момент который мне очень не нравиться - контролер питается от общей шины а не от usb, и если по питанию происходит провал контролёр перезагружается.... Но придется с этим как-то жить...
-
С упорами по краям да, косяк в прошивке. Знаю в чем дело. Я в версии под свою плату этот вопрос исправлял в одрайв не исправил. По щелчку и пропадания усилия. Вопрос. Одрайв как джойстик после этого продолжает работать? Возможны две ситуации. Это или перегружается одрайв, или срабатывает защита драйвера. Пружина в вилчек и форсэдит. Попробуйте с и без галочки инверт форс. В остальном. Я сейчас занят доработкой джойстика, он в приоритете и как только отправлю заказчику буду исправлять прошивку под одрайв. Там ещё пару моментов обнаружилось в процессе все будут добавлены. Бу
-
Ну если не загоняться в рамки то можно брать Fanatec / Simucube / Acuforce и не заморачиваться
-
Ну я бы сказал наоборот. Все что делает BLDC в DC пытаются сымитировать с помощью PID. Вообще предлагаю вынести этот разговор из данной темы. Потому что он не имеет смысла. Вам нравятся рули на DC моторах, мне нравятся рули на BLDC моторах. И эта тема о том как сделать такой DD руль при минимальной стоимости. Вы меня не убедите. По комбинации параметров для DD - вращающиймомент/габариты/тишина/детализацияфидбека/токмотора/отсутствие_cogging_еффекта/ЦЕНА - BLDC вне конкуренции. Вы не найдете другого такого широко доступного мотора способного на 19v-10А выдавать более 8Nm в статике без редуктора, будучи абсолютно беззвучным, способным воспроизводить различимые еффекты с силой менее полу процента от максимума, иметь размер банки консервов и при этом иметь цену на рынке меньше 25 долларов. Таких DC моторов в природе нет. После опыта использования DD базы я с этим не соглашусь. В качестве иллюстрации на что способен мотор. И это не предел. Он воспроизводит и более мелкие эффекты но их уже камера не ловит. Смотреть со звуком на максиму чтобы понять насколько он тихий.
-
ШИМ. По сути это единственный возможный способ управления щеточным мотором. Щеточный мотор или находиться в режиме замкнутом или разомкнутом. Замкнули провода - мотор начинает крутиться согласно заложеным характеристикам на поданом количестве вольт. Разомкнули - останавливается. И все, никакой другой контроль что будет делать мотор нам не доступен. Меняя скважность ШИМ мы управляем только скоростью вращения мотора. В бесщеточном моторе доступен более широкий спектр способов управления - в том числе и FOC(управление вектором поля) в котором мы управляем непосредственно усилием с которым ротор пытается занять конкретное положение. Потому что варьируя напряжение на каждой отдельной фазе мы поворачиваем вектор магнитного поля. Поэтому мы например можем установить мотор в режим "удержания" под произвольным углом в рамках полного оборота с очень большой точностью.
-
Не нужно. На одноосевом этих елементов нет.
-
Нет. Это просто на время запуска программы ForceEdit. В ней баг, и она воспроизводит пружину в противоположную сторону. Для игр включите нормально обратно. У вас и эффект пружины пропадал потому что и интегрированая и обычная стояли на 50. Пружина из ForceEdit приходила направленая в обратную сторону от интегрированой- и они друг друга компенсировали.
-
Это определенно какой-то клон неопределенной версии. 0.8 это их придуманная нумерация. Ноги 100процентов по другому. Там может вообще не 405RGT6 чип даже
-
Главное преимущество бесщеточного мотора над щеточным - возможность управлять мотором точным поворотом магнитного поля(в долях градуса электрического оборота) а не просто путем ВКЛ/ВЫКЛ. Но это тема для другого обсуждения Какой именно? с версии 3.5 вроде должно быть одинаково Он мог быть не мертвый а с непропаем. Китайцы грешат таким. Я под увиличительным стеклом пересматриваю все контакты и прохожусь паяльником по драйверу и контролеру.
-
На одноосевом для инкрементального энкодера ничего не надо. Судя по описанию раньше у тебя какие-то другие. Разберемся как освобожусь. И да. когда будешь проводить тест в ForceEdit с новыми настройками, убери Integrated Spring на 0 и убери галочку с Invert torque direction. Программа по неведомым мне причинам генерирует пружины в обратную сторону от того что генерируют игры.
-
Правильно. А вот настройки все в обратную сторону Немного по настройкам: Enable constant via sine - выключить. Это галочка для поддержки Raceroom. Они шлют еффекты нестандартным способом Invert joystick direction - ставить или не ставить по тому движеться ли курсор джойстика в правильную сторону в joy.cpl Invert torque direction - ставить в зависимости того в какую сторону давит сила. совпадает ли с нужным направлением. Steering range - диапазон вращения. Steering smoothing - сглаживание самого вывода джойстика(то что видит joy.cpl) . Это чтоб сглаживать шум энкодера. Для инкрементального можно ставить минимально. Но лучше 0 не ставить. можно 1. Overal effect power - контроль общего усилия всех суммированных эффектов. 0 - нет еффектов вообще 100 - полная сила. Для 12 вольт смело можно ставить 75. Effect smoothing - сглаживание усилия эффектов. Ставить минимальное при котором не будет паразитных шумов в моторе. Бывает напримаер в rFactor проходят какие-то сильные пики одиночные - это чтоб их сгладить. Начать с 5. Если никаких странных шумов мотор в играх производить не будет - ставить вообще тогда на 1. Constant, Periodic, Spring - сила отдельных эффектов. Здесь в большинстве случаев должно стоять 100. Добавлялось чтоб отключать отдельный эффект(если вдруг понадобиться) но если нет спец желания какой-то эффект отключить - ставить в 100. Integrated Spring - сила просто центрующей пружины не привязаной к еффектам FFB. Добавлялось чисто для проверки есть ли усилие без запущеной игры. Ставить на 0 непосредственно для игр чтобы не мешало эффектам из игры. Демпинг - да. Он есть. Еще и тебе повезло с мотором у тебя на 30х магнитах скорее всего. Мотор генерирует серьезные токи во время вращения. Для слива генерируемых токов в будушем будет добавлена цепь с тормозным резистором, но сейчас занят другим проектом и не могу сказать когда решение увидит свет. Но когда выкрутишь силу еффектов в нужные значения по сравнению с силой еффектов демпинг будет чувствоваться меньше. P.S. Напиши что получиться .
-
ForceEdit.zip Попробуй эту программу погоняй в ней разные эффекты. Сделай скриншот своих настроек выложи здесь и опиши результат как ой результат прогонки эффектов в программе
-
Хоть напишите в паре с каким энкодером и какие настройки установлены в программе настройки Прям сейчас занят джойстиком, как только освобожусь поковыряемся. Если все установлено на максимум то ограничение получиться по самому слабому компоненту)) А тут уже зависит - кто у нас слабое звено. Но Для связки ODrive-моторХоверборда-БП расклад будет примерно таким. Что будет с ODrive. Есть статья где меряли нагрев контролера в разных сценариях https://discourse.odriverobotics.com/t/odrive-mosfet-temperature-rise-measurements-using-the-onboard-thermistor/972. Согласно ей даже для варианта 100% нагрузки без обдува рекомендуется не превышать 40А. Хм.... Дофига. Мотору на 40А гарантировано гаплык, но БП на 40А надо еще поискать. В итоге ODrive в данном случае самое сильное звено и ему превышение тока грозит мало(а с обдувом так и вообще постоянные ток в 70-80А согласно статье). Что будет с мотором. Похоже в данной комбинации мотор самое слабое звено. Если БП в теории можно взять любой мощности то мотор ограничен. Если взять 24 вольта за базу то на 100% мотор будет тянуть по прикидка около 35А и гарантировано отойдет в мир иной. На 12 вольтах на 100% будет горячий, но на лимит не выйдет. Будет тянуть около 15А(прикидочно) даже если БП сможет выдавать больше. По моим прикидкам если взять ODrive, БП 12вольт 20А и мотор от ховерборда - Все елементы смогут работать без ограничения в программе(хотя вы не сможете.... мотор реально сильный и катать на таких усилиях вы не будет, будете ставить что-то около 75% в программе) При увеличении вольт БП надо будет снижэать силу в программе.
-
Да. Она совместима с ODrive. Нет. На сегодняшний день не реализовано его использование. Я занимаюсь этим вопросом но когда будет не известно К сожалению они убрали переключатель в DFU мод, поэтому чтоб ее прошить надо ST-LINK.
-
Это может быть не плата а разъем USB. Как видим по опыту пропайка у китайцев страдает. Может найдешь кого кто может проверить разьем
-
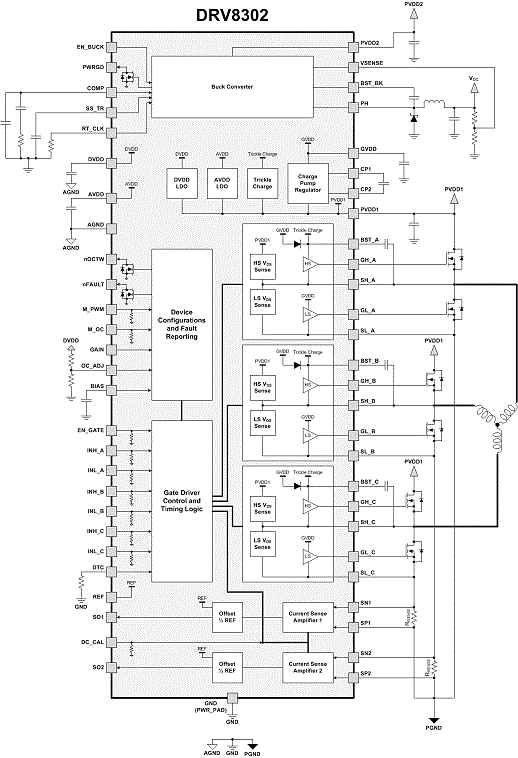
Я бы не спешил прям драйвер сразу списывать. Надо как-то проверить что обвес бак конвертера рабочий. По даташиту бакконвертер изолирован от остального драйвера. Я бы попробовал его "завести". Всё-таки обвес копеешный по сравнению с драйвером. Возможно не загружается потому что драйвер не отвечает на инициализации. Не могу так на вскидку сказать такой ошибки к меня не появлялось. Двухосевой будет. Там на самом деле прошивка одинаковая на обе версии. Просто на двухосевой второй контур не инициализируется. Так всё у них одинаковое. Но. Чето слишком много нерабочих одрайвов от китайцев.... Но кастомную плату тоже не собрать, СТМок в наличии нигде нет ... Блина, кризис....
-
5 вольт там берется с бак конвертера встроенного в драйвер. В схеме на второй странице который разрисован. content://com.android.chrome.FileProvider/images/screenshot/1632927293512658552377.gif PH ноги по схеме. Возьми увеличительное стекло и просмотри все ножки драйвера что везде пропай и нет соплей. Я бы вообще по всей плате просмотрел что пайка везде в порядке.

-
ODrive для работы требует подключения по основной шине питания(это кстати основной момент который мне в ODrive ОЧЕНЬ не нравиться, нельзя просто воткнуть USB и чтоб работало.). Прошить можно по STLINK или по DFU. Для прошивки STLINK-ом нужно: - подключить от STLINK-а 4 провода: GND, SWDIO,SWCLK,RESET в соответствующие пины на ODrive. Питание от STLINK у так и меня не заработало. После этого подать основное питание. STM32CubeProgramer теперь должен будет видеть плату. - подключить по DFU : переключить мелкий тумблер возле которого надпись DFU, подключить USB шнур, подать основное питание. STM32CubeProgramer должен видеть плату при выборе USB в выпадающем меню типа подключения. И да. STM32CubeProgramer тоже глючный, если если отключить устройство физически не нажав в программе DISCONNECT следующие подключения она не видит. Надо перегружать.
-
Я вообще всю плату с холами выкидываю. Откусываю ножки холов и плату в мусорку.
-
Такс, коллеги. Я созрел на написание универсальной прошивки, которая будет поддерживать одновременно и ODrive и мою плату, и инкрементальный и абсолютный энкодер. Так что я исчезну на некоторое время, и вернусь с прошивкой поддерживающей все. До выката прошивки других обновок от меня не будет.
-
Все не совсем так просто. Дело в том что чем меньше железа тем меньше мотор может выдать мощности с тех же самых ампер, а повышение ампер - повышение нагрева. Надо будет тестировать и не перегревать. Но по опыту на магнитах 15мм свои около 6Nm он выдает без перегрева. Но на 8Nm будет мне кажется перегреваться. Мне попадались еще хуже. На 15мм даже можно нарваться
-
Магнитов 30мм с головой. на 19V 50% усилия уже легкий фитнесс.