asanter
-
Постов
45 -
Зарегистрирован
-
Посещение
-
Победитель дней
2
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент asanter
-
Абсолютные энкодеры и инкрементные это два разных типа энкодера. Некорректно их сравнивать. Руль можно сделать и на том и на другом, но инкрементные npn энкодеры подходят любые, а под абсолютные надо писать прошивку под каждый свою. Инкрементные дешевле чем абсолютные и при наличии A, B, Z сигналов умеют определять центр руля. Чем больше ppr тем лучше. Лично я пользовался энкодером 400ppr и его при подключении без редуктора было явно мало. Чувствовалась ступенчатость руля. А вот китайского omron на 2000ppr на мой взгляд совершенно достаточно.
-
Меня пока не записывай. У меня есть лишняя STM32F407VET6. Она вообще ценная или нужен голый процессор не припаянный?
-
А что по срокам? Я бы может вписался. Не знаю есть ли смысл менять одрайв на нее
-
Мне кажется, что и для обычных щеьочных двигателей и для BLDC моторов нужно чтобы можно было подключить провода в случайном порядке и если мотор крутится не туда куда надо то просто поставить галочку в прошивке
-
Вы использовали прошивку для одрайва и абсолютный энкодер? Там же всего три провода. Если сила не в ту сторону то можно просто махнуть два провода местами любые или поставить галочку инверсии усилия. @propeler я правильно понимаю, что прошивка для абсолютно энкодера лучше отлажена чем для инкрементного? Или там в обоих версиях баги? Может мне пока с абсолютным попробовать поиграться?
-
@cahek2202 Я могу научится всему что угодно. Вопрос только во времени. Одрайв стоит как 2 дня работы. Мне проще купить готовый одрайв чем учиться паять мелкие компоненты, докупать оборудование для этого
-
Это было бы круто. Не только потому что у меня одрайв, но и потому, что если он сломается я закажу на али новый. Сделать самому себе кастомную плату для меня непосильная задача. Я вообще не представляю как можно припаять что-то меньше 1206 не говоря уж о том, чтобы запаять STM на плату. В этом плане наличие готовых одрайвов в продаже мне кажется жирный плюс.
-
Зависит от калибровки. Иногда пружина работает правильно, а иногда тянет не к центру а из центра и тогда надо ставить галочку инверсии силы. А иногда ничего ставить не надо так как работает после включения сразу правильно. Хороший кстати вопрос. А там есть защита по току? Или по нагреву или какая? Этот момент надо еще проверить. Надеюсь скоро освободитесь для доработки. Вижу очень большой потенциал сборки рулей на таких моторах. По крайней мере если это все будет работать без косяков то наконец можно будет отказаться от проектов на DC моторах. C BLDC моторами я видел проекты, но там столько ардуин нужно одну к другой подключать, столько костылей, столько геммороя, что если будет вот такой простой проект всего из трех компонентов (БП одрайв и мотор) то такая сборка мне кажется рискует стать народной.
-
@Sieben В общем решил погонять его в играх. Сначала открыт программу wheelcheck в которой раньше на видео показывал как работает пружина и там пружина тоже стала толкать руль не к центру а наружу хотя до этого работала правильно. Получается уже две программы толкают пружину не в ту сторону что наводит на мысль что ошибка именно в прошивке. Еще несколько раз перезагружал одрайв и каждый раз он ведет себя по разному. То есть упоры, а после следующей перезагрузки уже нет. Открыл евротрак симулятор. Там фитбек есть вроде но мне без педалей тестить неудобно. К тому же в какой то момент происходит щелчок и на моторе пропадает не только фидбек, но он начинает просто совободно крутится во все стороны как если его полностью отключить от одрайва. Такое ощущение что в одрайве защита срабатывает какая-то и просто отсоединяет мотор насовсем до перезагрузки. Подкинул туда блок питания на 12в 32а вместо старого на 10 ампер. Блок уже в защиту не уходит. Открыл beamng drive. Там фидбек завелся сразу и как надо. Чувствуется когда колеса срываются в занос (насколько это можно почувствовать одной рукой нажимая W на клавиатуре) но опять же в какой то момент произошел щелчек (успел заметить мигнувший светодиод PWR на одрайве) и одрайв опять "отключил мотор от себя". При этом нагревом там и не пахнет. Щупал плату руками а потом взял у отца тепловизор и смотрел в него. плата 30 градусов от силы. @propeler Может ему 12 вольт мало? У меня есть еще киловатный бп на 24в 40А с ограничением мощности и еще есть 2.5кв БП там вообще можно до 120в постоянного тока накрутить при 20амперах
-
Еще бы. Я же дипломированный специалист. А если серьезно, то у меня все тестовые стенды так выглядят. Какой смысл печатать красивый корпус если механика не работает как надо. Главное правило - тестируй как можно быстрее. Нет ремня - бери резинку от трусов, нет принтера - пили из фанеры. Я так первый свой руль собирал. Полностью все разработал, напечатал, собрал и только потом обнаружились недочеты по железу и электронике, которые было бы легко выявить если бы я все это погонял "на коленке". Если заработает механика, то у меня будет много длинных зимних вечеров на дизайн и печать корпуса, сверление, пиление и прочие приятные занятия. Я конечно же все подряд не записывал. Мотор за слайдером ездит. Игру пока не включал. Хочется сначала разобраться с этими странностями в поведении кнопки центровки и "провалами" там где должны быть упоры
-
Всем снова привет. Рад, что тема немного оживилась и больше спасибо за ценные комментарии. @propeler После предыдущего большого поста с разбором всех моих неправильных настроек я думал, что сейчас то я галочки где нужно поставлю и все заработает. Но ощущения от этого всего странные. Вроде работает но как то странно. Иногда после включения и калибровки упоры крайних положений работают, а иногда добравшись до крайнего положения мотор улетает по направлению движения и зависает как будто в яме. При этом идет активное потребление тока. Про кнопку сброса центра показал в видео. Может быть появление пилы связано с неравномерной натяжкой ремня на энкодер (никогда не стоит исключать механическую часть проблемы) но все равно очень странно что без изменения настроек и перетыкивания проводов из раза в раз после перезагрузки мотор ведет себя по разному, тянет то туда то обратно. БП иногда уходит в защиту (макс ток около 10ампер по паспорту) но ставить более мощный я пока не хочу так как киловатный БП боюсь что-нибудь сожжет при неудачных опытах. Руль при подаче питания на odrive становится тяжелым, но теперь я понимаю, что с этим ничего не сделать. А вот то, что иногда происходит щелчек и фидбек просто пропадает это странно. Причем это не БП в защиту уходит так как лампочка на нем горит, а одрайв не перезагружается. Тем не менее после такого руль снова становится легким как будто вообще не покдлючен к плате (Решается перезагрузкой). Остальное более подробно в видео. В итоге получаем на данный момент что фидбек работает, но кнопкой центровки руля особо не воспользуешься по изложенным в видео причинам. ЗЫ интересно могут ли это быть проблемы с энкодером.... Последний раз этот энкодер работал исправно. Могу попробовать поставить подороже на 2000ppr но что-то мне подсказывает что проблему это не решит
-
А у меня ко второму мотору подключен AS5048. Хотелось бы по возможности его использовать. Так как руль компактнее с ним и не надо ремней никаких. Для этого энкодера нужно в одноосевой одрайв вносить изменения? Я вроде с ним мотор тоже подключал и в Винде в игровых устройствах крестик оси тоже туда сюда крутился
-
Моторы мне достались жирнющие. 30мм магниты и меди намотали будь здоров. Жалко, что сейчас ничего не сделать с тяжестью вращения. После DD щеточного очень непривычно что крутится так туго. Правильно я понимаю, что раз мне нельзя использовать галку инверсии силы фитбека то мне нужно просто махнуть два любых фазных провода чтобы фидбек по умолчанию работал в правильную сторону? Буду пробовать снова. Спасибо!
-
Я понимаю что оно не должно так работать. Но я не знаю куда дальше копать. По образованию я архитектор и моих знаний хватает, чтобы более менее понять как работает руль со щеточным двигателем. Собственно таких рулей я насобирал уже много разных в том числе и DD, но у них у всех присутствует "закусывание", неравномерность вращения и мне очень хочется собрать компактный руль на BLDC моторе. Чтобы не грелся, имел хороший фидбек и не требовал блока питания размером с половину стола. К сожалению все на что я могу надеяться - это помощь от @propeler и остальных, ранее уже собравших такой же руль с мотором от гироскутера и одрайвом. Кстати вначале описывалось какие изменения нужно внести в одрайв. Но потом вроде писали что ничего трогать не нужно. Я свой одрайв никак не модифицировал. Нужно ли разрывать какие-то перемычки на плате или что-то допаивать?
-
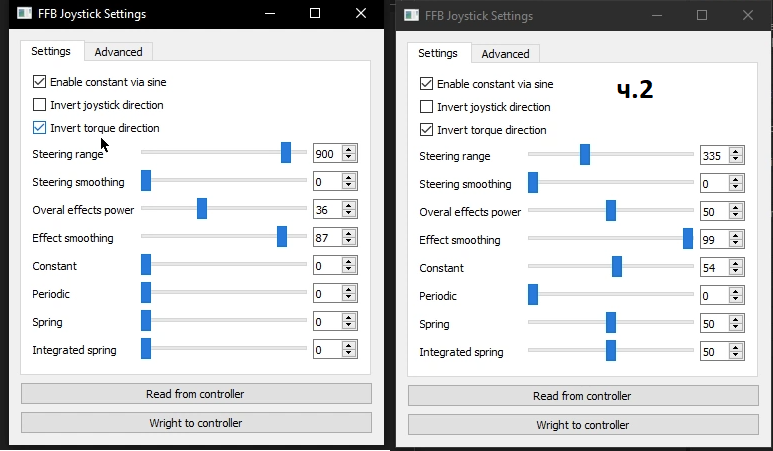
Спасибо за ответ. Записал видео: Работают ограничения крайних положений руля. Виндус видит игровое устройство Одрайв. Программ ForceEdit вроде как видит руль и даже как-то что-то с ним делает, но явно не то, что нужно. Видео получилось немного затянутое, но я не хочу его крамсать так как не знаю нюансов прошивки и что именно может повлиять на работоспособность. Слева параметры и первой части видео. Для второй части покрутил параметры. Они справа. В обоих случаях параметр CPR в прошивке установлен 9600 (400х4х6=9600 где 400 - кол.во пульсов на оборот, 4 - значение тиков на оборот, 6 - отношение ведущей шестерни 120 зубов к ведомой на энкодере 20зубов) Очень надеюсь на ваши идеи что можно еще проверить, чтобы заработало. Ну или что я тут делаю не так как надо

-
Всем привет. Нужна помощь! Сегодня первый раз собрал всю механику воедино и попытался запустить устойство. Однако фидбек так и не заработал. Сначала я реализовал схему из поста выше и закрепил spi энкодер на валу с помощью увеличенного подшипника. Прошил odrive hex файлом прошивки с гетхаба с помощью st link. При подключении устройство определилось как игровое. Настроил, прогнал тест. В виндоусе при повороте руля в игровых устройствах крестовина ползает влево вправо как и должно быть. Работают упоры в крайних положениях. Для настройки я использовал UI который называется "btn8982-as504x-20210809-ui.exe" так как в папке всего два файла. Для одрайва с инкрементным и этот. Я правильно сделал? Единственное что меня смущает - руль движется очень тяжело. Как будто обмотки замкнуты постоянно. Когда мотор не подключен или обесточен odrive мотор крутится одним пальцем, но стоит подать питание на odrive как в мотор как будто меда налили. Эффект пружины работает но очень вяло и возвращает руль далеко не в центральное положение. В играх ffb нет вообще. Я решил попробовать с инкрементным инкодером. Перепрошил плату на прошивку для одрайва и инкрементного энкодера. При включении мотор крутится туда сюда. Работают крайние положения, но руль опять крутится с большим трудом. Сначала программа wheelCheck заставляла его дёргаться и в евротрак симуляторе руль на что-то вяло реагировал (в программе и в игре 100% фитбек) но потом после очередной перезагрузки фитбек в играх пропал. При этом в виндоусе плата определяется и перекрестие в игровых устройствах двигается как надо (и работают ограничители поворота руля). Помогите мне пожалуйста.
-
Если металл сыромятина то Вам определенно повезло. К сожалению у меня и металл оси закалённый и никаких станков нет вообще кроме пары 3д принтеров. Мне кажется, что у многих такая же ситуация и нечем это все обрабатывать. Было бы здорово иметь возможность собрать все это минимальными доработками поэтому и предлагаю вариант с заменой подшипника. Старый вынул, новый вставил и пошел пиво пить пока принтер печатает проставки.
-
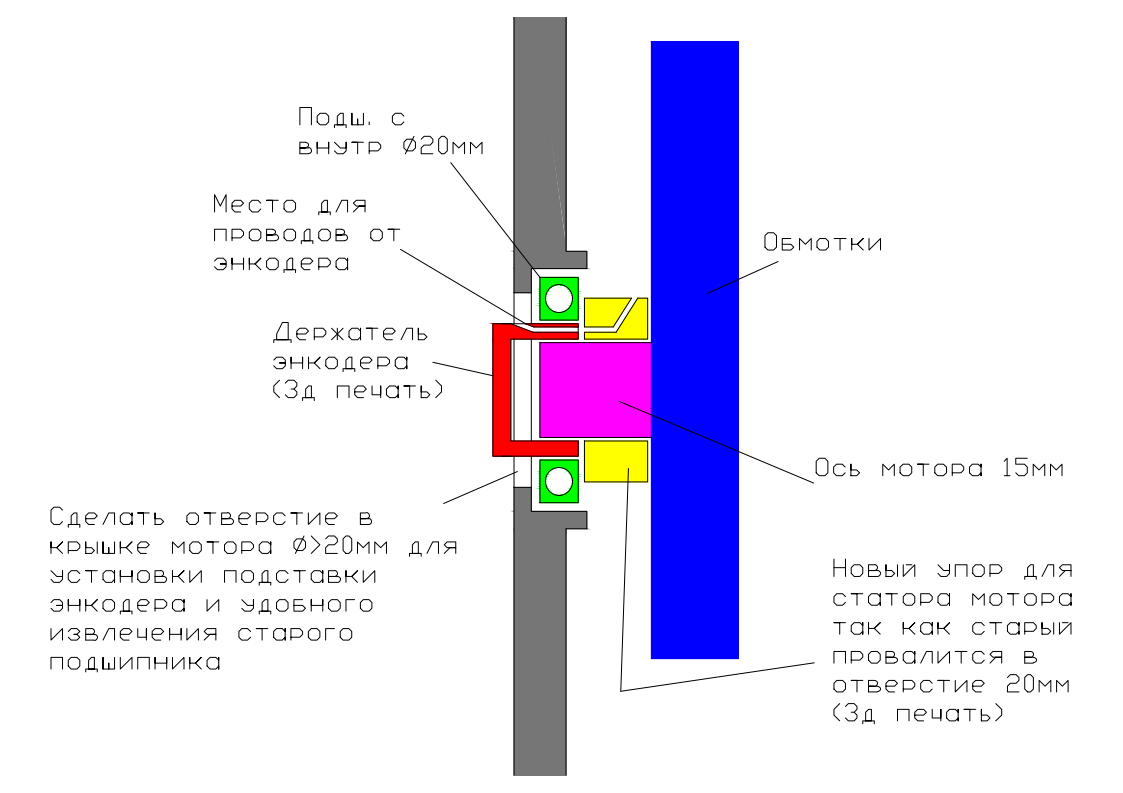
Большое спасибо за развернутый ответ. Постараюсь не спалить одрайв так как он из всех компонентов только один. Кстати может кому то будет интересно. Придумал как закрепить энкодер на валу мотора от гироскутера. и при этом не нужно отрезать закаленную ось мотора, а всего лишь сделать отверстие в мягкой крышке мотора. Нужно сделать отверстие в крышке, вытащить подшипник в моем случае d15 D32 h7 (у меня такое - же колесо как у автора прошивки) и заменить его на d20 D32 h7. Далее печатается крепление энкодера, которое компенсирует образовавшийся зазор между осью мотора и новой обоймой подшипника. Также в нем закладываете выемку по которой проходят провода от энкодера внутрь мотора и дальше внутрь оси. Схему прилагаю
-
Приветствую. На данный момент есть вопрос по подключению одрайва. У меня есть DD руль собранный на обычном щеточном моторе + мощный БП. Подключено это все по классической схеме через драйвер BTS7960. Там ток ограничен самим мотором и алгоритм работы такой сборки мне вполне понятен. Вопрос, а что ограничивает ток при подключении odrive к мотору от гироскутера? Мне нужно обязательно снижать максимальную силу в программе? Или нужно использовать блок питания с ограничением тока? Как это работает? И еще вопрос. У Odrive есть защита от перегрева?
-
1. Авдюшин Александр 2. Россия. Московская область. 3. 25 4. Симуляторами не увлекаюсь, казуал 5. ETS 2 6. 3д печать, сборка электротранспорта. 7. - 8. - 9. машины нет 10. Из поисковиков