koxbox
-
Постов
55 -
Зарегистрирован
-
Посещение
-
Победитель дней
1
Тип контента
Профили
Форумы
События
Блоги
Магазин
Весь контент koxbox
-
 Подскажите, пожалуйста, а в принципе в чем отличие отношений шкивов? Если взять некий усредненный оптимум (идеальный мотор, питание), то в чем отличие, скажем 1:6 и 1:3? Насколько я понял по обрывочным мнениям, то высокое отношение (1:6) даст более тяжелый руль, меньше информативности. Но можно ли тезисно подытожить? Типа "в случае таком-то, будет 1. больше греться мотор, 2. будет легче руль, 3. информативность лучше..." и т.п.
Подскажите, пожалуйста, а в принципе в чем отличие отношений шкивов? Если взять некий усредненный оптимум (идеальный мотор, питание), то в чем отличие, скажем 1:6 и 1:3? Насколько я понял по обрывочным мнениям, то высокое отношение (1:6) даст более тяжелый руль, меньше информативности. Но можно ли тезисно подытожить? Типа "в случае таком-то, будет 1. больше греться мотор, 2. будет легче руль, 3. информативность лучше..." и т.п. -
Да, сохранял и в eprom. Батарейка свежая. Просто включаю базу и запускаю MMosFFB - во вкладке Device Setup все обнулено. Выставляю значения, передергиваю STM и все ок, значения сохраняются до перезапуска MMosFFB. Питание: 12V 34А 400W БП и две BTS (GAC913). БП точно не выбивает. Как проявляет себя выбивание бтс-ок?
-
Всем привет. Я собрал тест-стенд 2.0 подключил и вот возник ряд вопросов. Все заработало, но на 1:6 руль тяжелый, приходится выставлять силу 30% в MMosFFB и 35-45% gain в ACC, ну уже приехали шкивы на 1:5 и 1:3, буду тестить с ними. 1. Может ли кто-то выложить файл LUTGenerator.exe? 2. Каждый раз при запуске утилиты MMosFFB, приходится настраивать параметры (вкладку Device Setup) PWM, CPR энкодера и пр. Сохранял куда только можно - не помогало. Знает ли кто, как это пофиксить? 3. Поначалу выставил силу в 50% в игре и MMosFFB. Руль стал очень тяжелый. Включил ACC, на треке в провороте перекрутил руль - то есть продолжал немного докручивать его при растущем сопротивлении и в этот момент пропал FFB, руль стал легким. Помогла перезагрузка STM. Перепроверил и удалось воспроизвести - при "перекруте" через сопротивление пропадает FFB. Уменьшил силу до 30% в MMosFFB и 35-45% gain в ACC и воспроизвести такое не получилось, все работало отлично. Короче, почему пропадал FFB? 4. Как лучше выставить Overall Filter? При 0 руль местами дрожжит, отрабатывает мельчайшие эффекты, а уже при 2 показался уже малоинформативным. Что посоветуете тут? 5. Главная проблема, что MMosFFB как-то странно лагает словно бы. Например, включил STM-ку и MMosFFB, а WeelCheck не видит сразу. Подождал несколько секунд - WeelCheck все увидел, заработал. А бывает и не увидел и приходится перезагружать. А бывает видит (энкодер отдает угловые координаты), но тесты не запускаются. Что это может быть? Я конечно соберу статистику косяков когда сделаю чистовую сборку, но может быть то, что уже всплыло в процессе уже знакомо кому-то. Буду благодарен за инфу и советы.

-
К слову, было бы интересно узнать, а как обстоит дело с "пустым" рулем на фирменных базах. У меня, увы, нет опыта ни с ДД, ни с ременными базами. Кто знает, как это там?
-
Но вот здесь человек достаточно ясно пишет про питание скрутки. Это я не правильно понял, получается?
-
Да? Ну значит я совсем неверно прочитал эту схему и все сообщения Beg, предложившего ее. А вот так "заработало":
-
А до этого я не запитывал на 5V скрутку VCC+R_EN+L_EN соответственно.
-
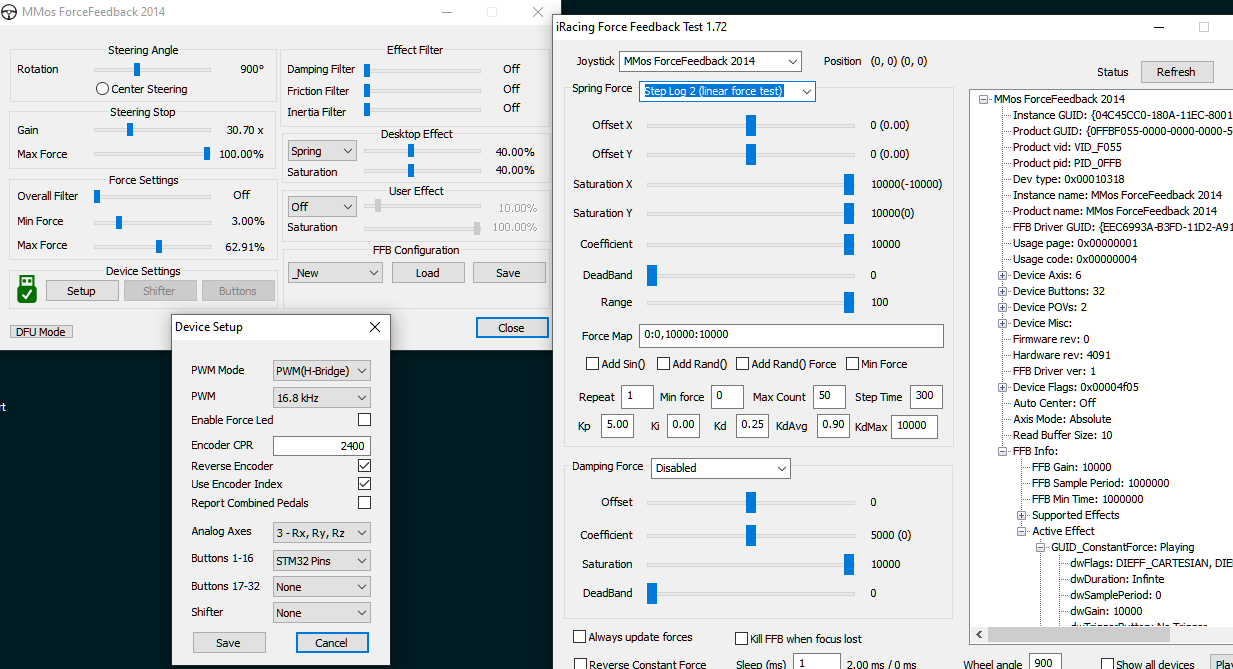
Но в MMosForceFeedback.ini (полагаю, что туда софтина и пишет) есть все сейвы конфигурации, да, однако это параметры ffb БЕЗ параметров ШИМ. Как я и писал - загружать нужные мне параметры ffb получается автоматически, но параметры ШИМ всегда сброшенные и приходится выставлять их руками.
-
Пришла мысль, что остался один режим, в котором я еще не проводил тест - это запитка VCC бтс-ки пятью вольтами по изначальной схеме. Быстро спаял шлейф, накинул и, о чудо, заработало: вал мотора ожидаемо налился силой и проворачивался с усилием, четко обозначился софтлок, при запуске теста Simple Spring - ротор провернулся на несколько градусов (на моем G27 аналогичная реакция), при запуске теста Force Spring - ротор быстро вращается только в одну сторону так, что обрывает скотч соединяющий с валом энкодера (на G27 этот тест дает быстрые колебательные повороты руля в обе стороны градусов на 5-10). Я не успел четко все проверить так как мотор скачет и просто разваливает весь "стенд", завтра надо наколхозить новый, закрепив все элементы. Заметил странность - мотор вроде как первые пару пусков не останавливался даже при переводе wheelcheck в режим Disabled и приходилось выключать БП, но после стал слушаться wheelcheck, а также вроде как не запустилось на 16.8 килогерцах, но это не точно, тк стенд развалился. Завтра все это перепроверю. Основной вопрос: какой вывод из этого всего можно сделать? С BTS что-то не так или что? Вопрос дополнительный: это нормально, что выставлять режим ШИМ приходится каждый раз? Сохраненная конфигурация меняет лишь параметры FFB, но вкладка Device Setup остается с дефолтными значениями и приходиться выставлять заново режим ШИМ, его частоту, CPR энкодера и пр. Сохранял и в Eprom, но это ничего не меняет - при загрузке вкладка дефолтная.
-
Да, снимал. Поищу в городе, но на случай кидай ссыль, может и закажу.
-
Менял 9/11, запускал Force Spring - никакого эффекта.
-
Wheelcheck энкодер видит: Нашел мультиметр 1) прозвонил шлейфы stm-bts (PE11-RPWM, PE9-LPWM) - звенит. 2) переключил на вольтметр, запустил режим Cycle на Wheelcheck и один щуп мультиметра кинул на GND STM-ки, второй на PE9, потом на PE11 - показывает какие-то значения. Отсюда делаю осторожный вывод, что управляющий сигнал до БТС-ки долетает. Еще раз проверил мотор напрямую с БП - все ок, крутит. Переподключил вторую БТС - все по-прежнему. Или я в чем-то косячу или обе БТС мертвые. Но во второе что-то чисто вероятностно не верится
-
Спасибо за совет! Тогда на случай поищу шкив под 1:4. Да, БП свежий и рабочий (12V 34А 400W), мотор напрямую включал - крутит аки черт.
-
да, если честно, я так интерпретировал "gnd" на схеме (ну написано земля, я и накинул на землю). Перекинул на V- Но это не повлияло на результат - все ровно то же самое.
-
Всем привет! Собрал наконец свой "тестовый стенд" на STM32F407VET6, прошил стм-ку, подключил пару БТС по канонической схеме. Настроил MMosFFB вот таким образом: Запускаю WheelCheck - мотор не крутит. Однако энкодер работает - игра видит устройство и руль поворачивает. Мотор ранее проверял - он рабочий. Подключил отдельно одну БТС, потом другую, перепроверил несколько раз, еще раз аккуратно перекоммутировал - эффекта ноль, энкодер пашет, а мотор мертв. Подспудное ощущение, что проблема в настройке MMosFFB и управляющий сигнал не идет. Ребят, подскажите, пожалуйста, как мне найти проблему?
-
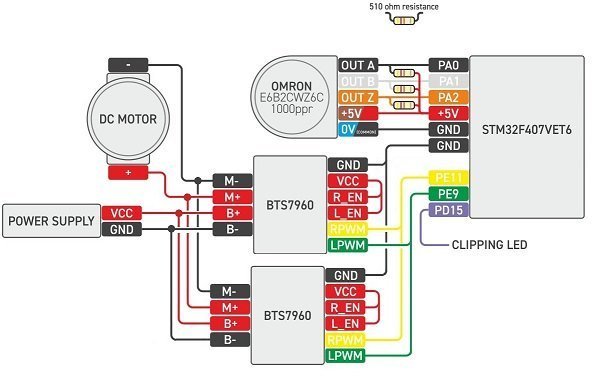
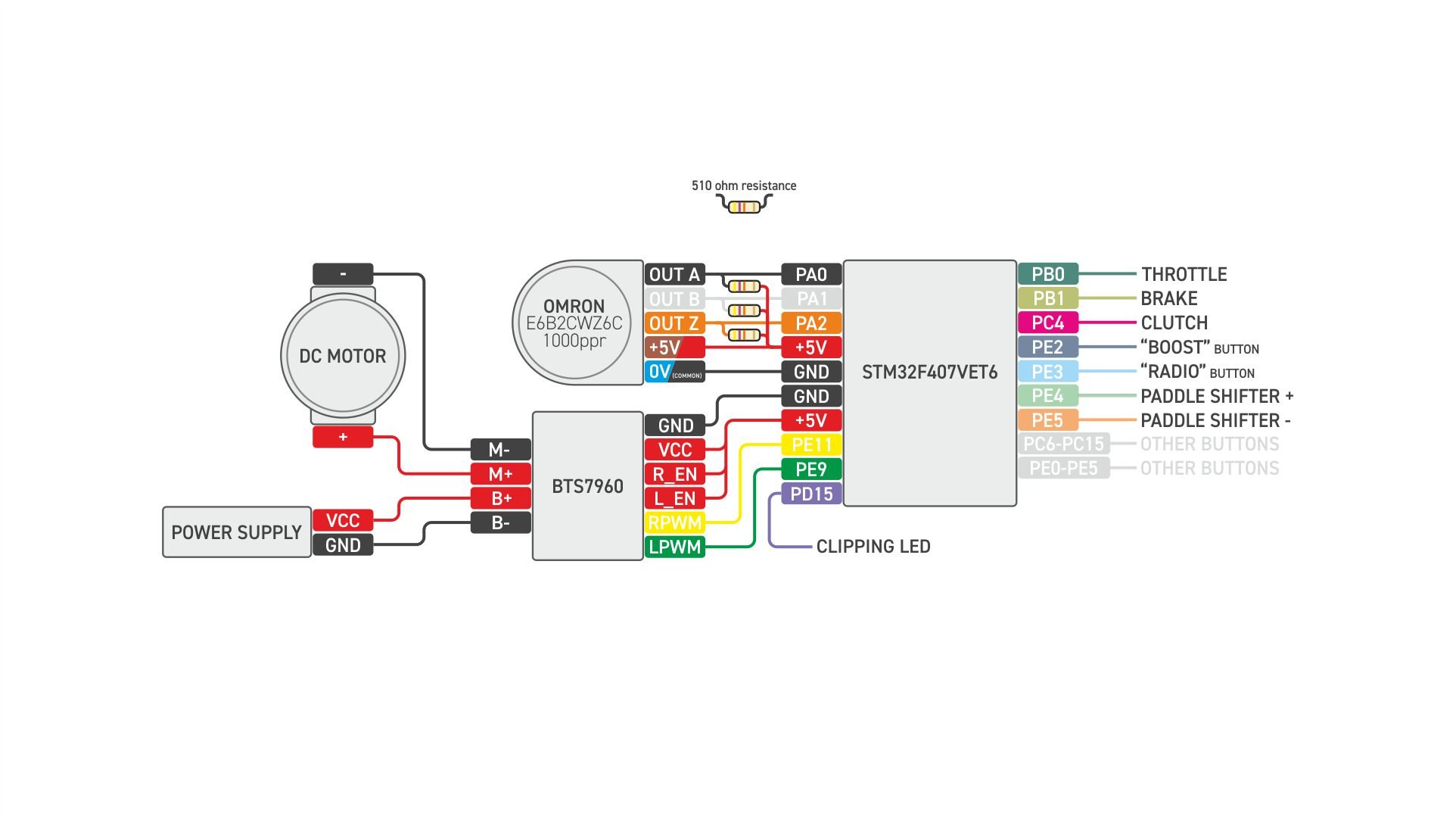
На схеме выше указан резистор 510 Ом На случай проверил по таблице цветового кодирования и маркировка скорее похожа на желтый-красный-коричневый, а это 470 Ом. Простите за занудство, но уточню, какой в итоге номинал у сопротивления верный?
-
По моему мнению, до 10К ничего в рознице не найти. Я, по крайней мере, не смог. В продаже есть хорошие сервомоторы с блоком драйвера, но это все стоит ближе к 20К и более.
-
Ребят, листал тему и видать в глаза долблюсь - просто никак не могу найти схему подключения. Дайте, пожалуйста, линку на самую распоследнюю "каноническую" схему подключения с двумя bts-ками.
-
Всем привет! Делаю базу на ремне под 1:6. Нужна подсказка по блоку питания, буду очень благодарен. Вот спеки моего двигателя: А вот БП, который я присмотрел: 12V 34А 400W Судя по спецификации мотора, при этом БП у меня получается примерно 2200 rmp (366 rmp на руле) и ~7 Нм (12,5 Kg/cm х 6). Вопрос: правильно ли я прикинул? Если да, то подходит ли этот БП для ременной базы с этим мотором и такой передаткой или есть более оптимальный вариант? Подскажите, пожалуйста.
-
Я считал вот тут https://ntma.com.ua/ru/calculationreminnaperedacha.html
-
@thor_nsk @Beg Сделать руль как отдельный usb-девайс, как раз проблем нет - по сути тот же баттонбокс получается, но я хотел максимально задействовать STM-ку. На STM32F407VET6 есть сокет под nRF24L01, поэтому идея с беспроводной передачей просто пушка! Буду ее раскуривать. Спасибо за наводку, парни!
-
Уточню - вопрос скорее о том, какие решения могут быть, для того, чтобы не тащить толстенный пучок проводов через вал + сделать компактный коннект на квикрелизе.
-
Друзья, как думаете, возможно ли сделать руль на ~20 кнопок/энкодеров но не с отдельной платой в руле, а на STM32, которая стоит в базе? То есть съемный руль на квикрелизе, но без usb-провода в комп, а с проводкой в базу через вал-трубу руля в STM-ку. Надеюсь, понятно объяснил. Есть ли у кого подобный опыт? Буду благодарен за подсказку.
-
Примерно 2,5 месяца я катаю с двумя старенькими басшейкерами. Возможно, интересующимся темой пригодится такой отчет. В принципе, особых ожиданий не было, только интерес и желание большей иммерсивности. Рассматривая варианты, понял, что в целом заднице-то пофигу - получать "эксклюзивные ощущения от трансдьюсеров для симрейсинга" или просто вибрировать от обычных басшейкеров - и суть и результат один. Поэтому купил на Авито пару Aura AST-1B-04 по 25W (3000 р) + автоусилитель DIGMA DCP-200 (2470 р) + блок питания RS-150-24 (1500 р) и смонтировал оба шейкера под кресло, на толстую фанерную плиту, на котором стоят салазки моего "полуковша". Из двух известных мне софтин управления шейкерами, выбрал SimHub, поэтому сразу купил лицензию за небольшую копеечку. Доволен. Короче, за это время я пришел к таким выводам: Информативность Собственно, чего все это ради. Да, мне реально нравится эффект, к нему здорово привыкаешь, но магии тут нет и быстрее вы не станете. Конечно, круто, когда переключение передач ощутимо пинает под жопу, но без этого легко можно обходится (а кому-то это может и мешать). Однако при должной настройке можно получать больше информации от трека и тачки и вот это уже может помогать. Девайсы Простых старых шейкеров по 25W хватает с головой - от шифтера был эффект реального пинка по стулу, поэтому я сделал усилитель на минимум, в SimHub общая громкость на 85%, а эффекты 25-70%, это дает информацию и не мешает. Я поставил весь кокпит на большие резиновые проставки для стиралки, без этого соседи думали бы, что я каждый день занимаюсь перестановкой мебели. Монтаж и детализация Софт позволяет растаскивать источники по углам рига и это реально дает хорошую детализацию. Я переставил один шейкер вперед, привинтил его под ноги на педальную платформу кокпита и настроил эффекты SimHub на Front/Rear. Стало детальнее в плане "перед-зад", то есть в случаях, когда что-то происходит с передней или задней частью автомобиля. Считаю, что 4 источника по углам рига покроют все нюансы в деталях. Не горит, но в перспективе сделаю такое. Сетап Я играю только в АСС, для iR эффектов в SimHub чуть больше. Каждый эффект я разбивал на частоты (или диапазон частот) и по силе-чувствительности-длительности, чтобы не борщить, но дать мне ясно понять, что происходит. На текущий момент у меня вот что настроено и меня это весьма устраивает по деталям и ясности восприятия, кратко: 1. GEAR SHIFT - просто легкие пендели от шифт-ап и шифт-даун. Мне это нравится и все тут. 2. WHEELS LOCK - срабатывает только когда колеса лочит при торможении. Реально полезно. 3. WHEELS SLEEP - Это просто переменная АСС с углом скольжения каждого колеса. Настраиваешь чувствительность под себя и Ок. Мне это реально очень полезно при настройке сетапа по оверстир-андерстир и для корректной работы рулем в поворотах в принципе. 4-5. ROAD RUMBLE + ROAD IMPACT - АСС несколько странно для меня отдает данные от дороги и поэтому я настроил оба этих параметра. Теперь я четко ощущаю, что заехал или просто коснулся колесом поребриков, кербов или грунт за треком. Контроль траектории, короче. 6. ROAD VIBRATION - В АСС это работа подвески. Тут я сделал чувствительность очень низкой, чтобы не мешать себе мелочами, а отслеживать только экстремальные ситуации, когда подвеска сильно и амплитудно работает (например, когда я цепляю трек). Остальные параметры считаю пока избыточными, но может быть что-то еще настрою при апгрейде системы в будущем. Возможно, это будет полезно тем, кто интересуется шейкерами-кикерами.
-
На Авито сейчас что-то все подразобрали, ничего не смог найти, остались только несколько PIK6. Легко снял редуктор и нашел спецификацию именно этого мотора (250W, TORQUE RANGE 45-80 Ncm) и в итоге решил купить. Мотор достался очень дешево. https://www.kingright.com.tw/en/product-396615/DC-MOTOR-M8156-250W-φ89mm-45-80-Ncm.html Полагаю, что он достаточен под ременной привод (~1:6). Теперь раздумываю, какой блок питания под него взять. Как считаете, какие параметры питания будут оптимальны для него?